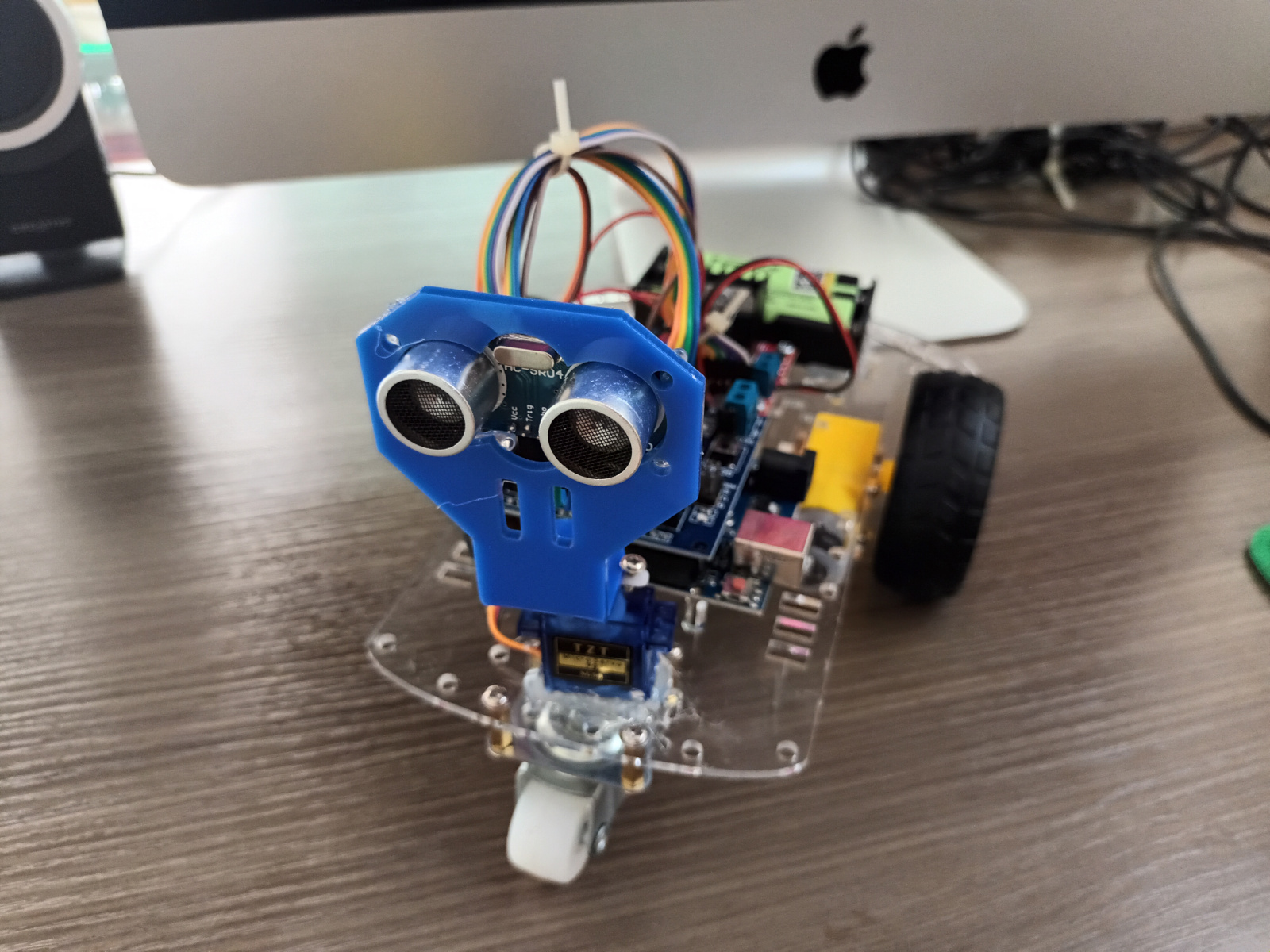
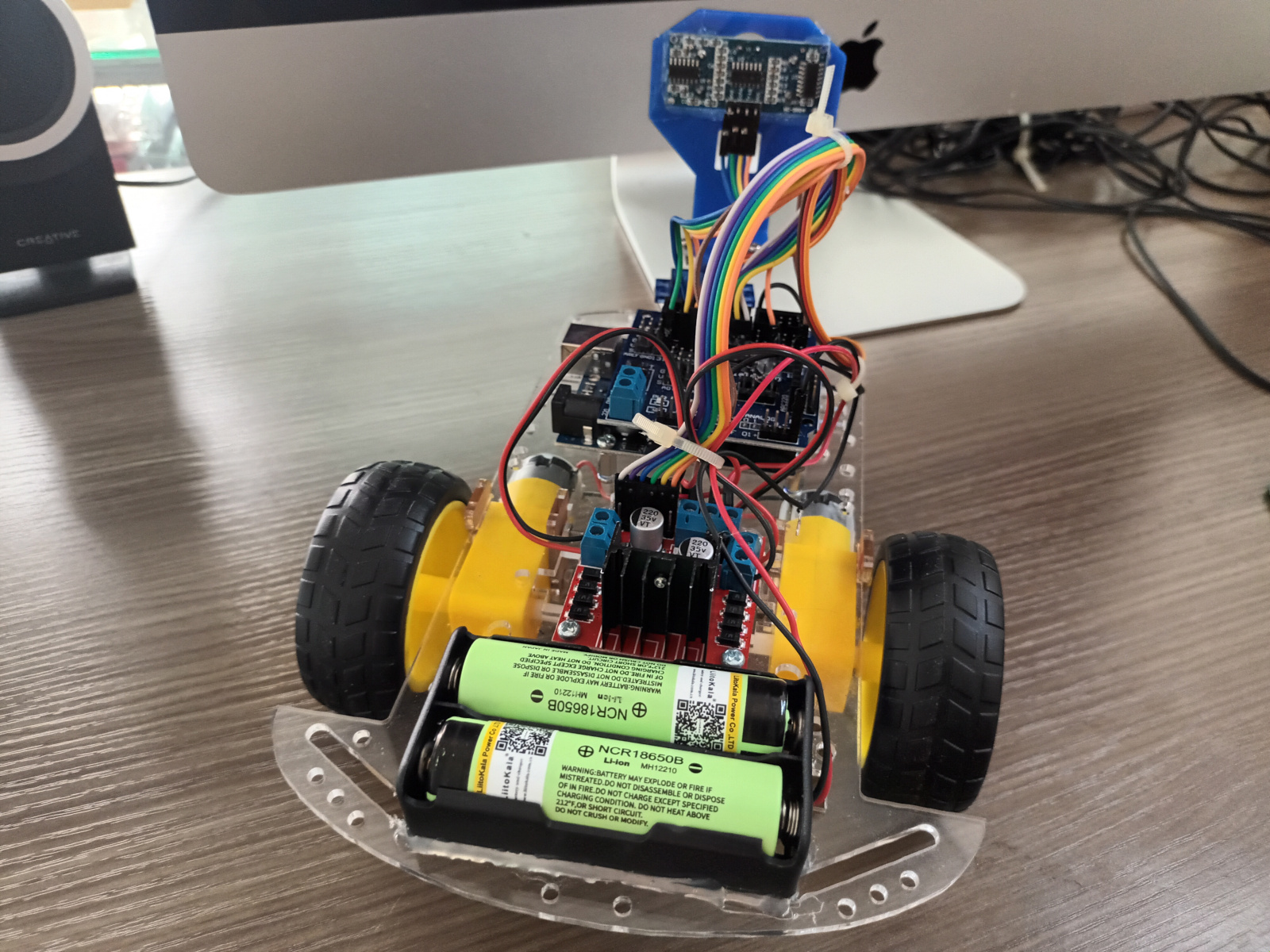
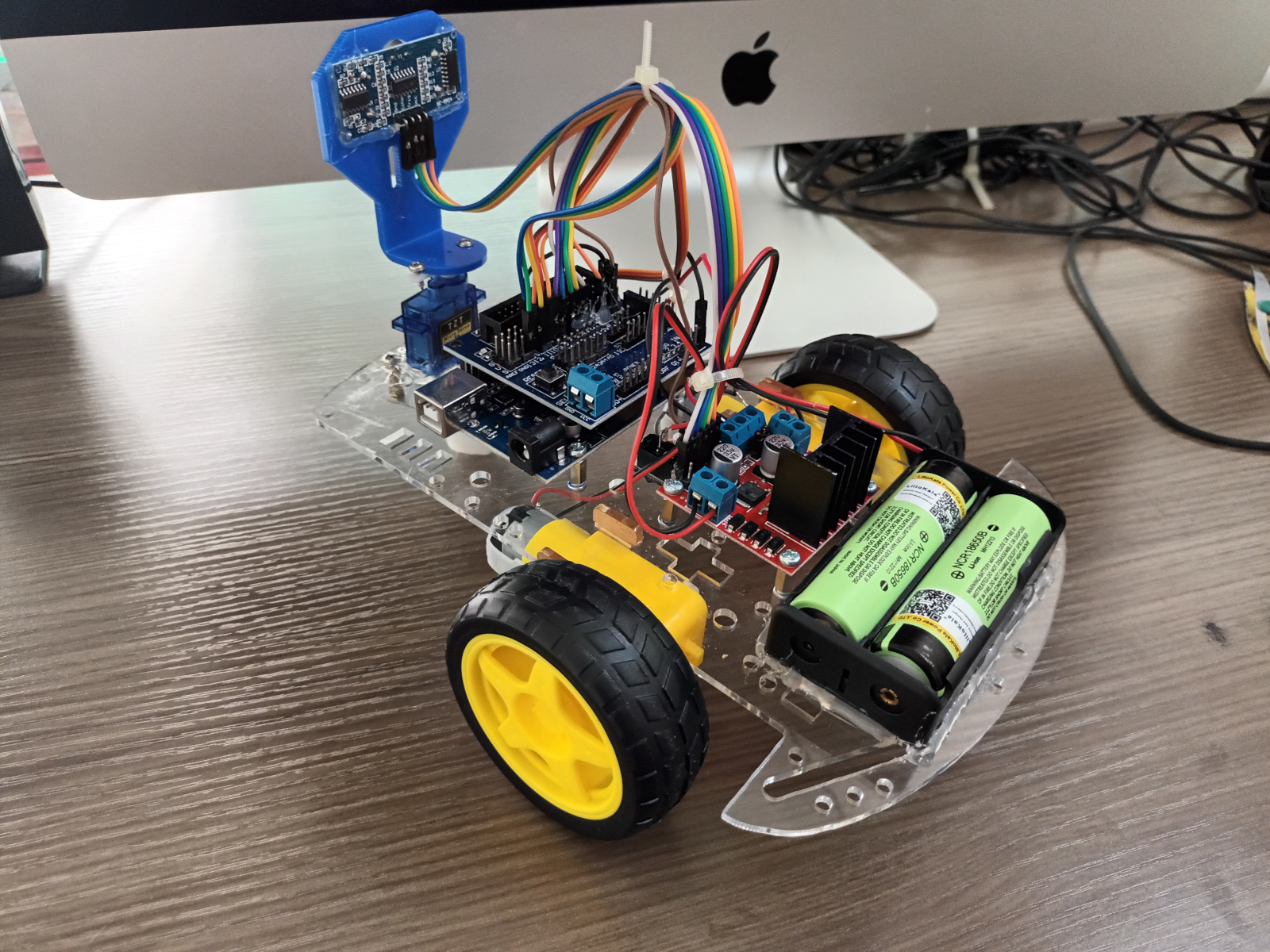
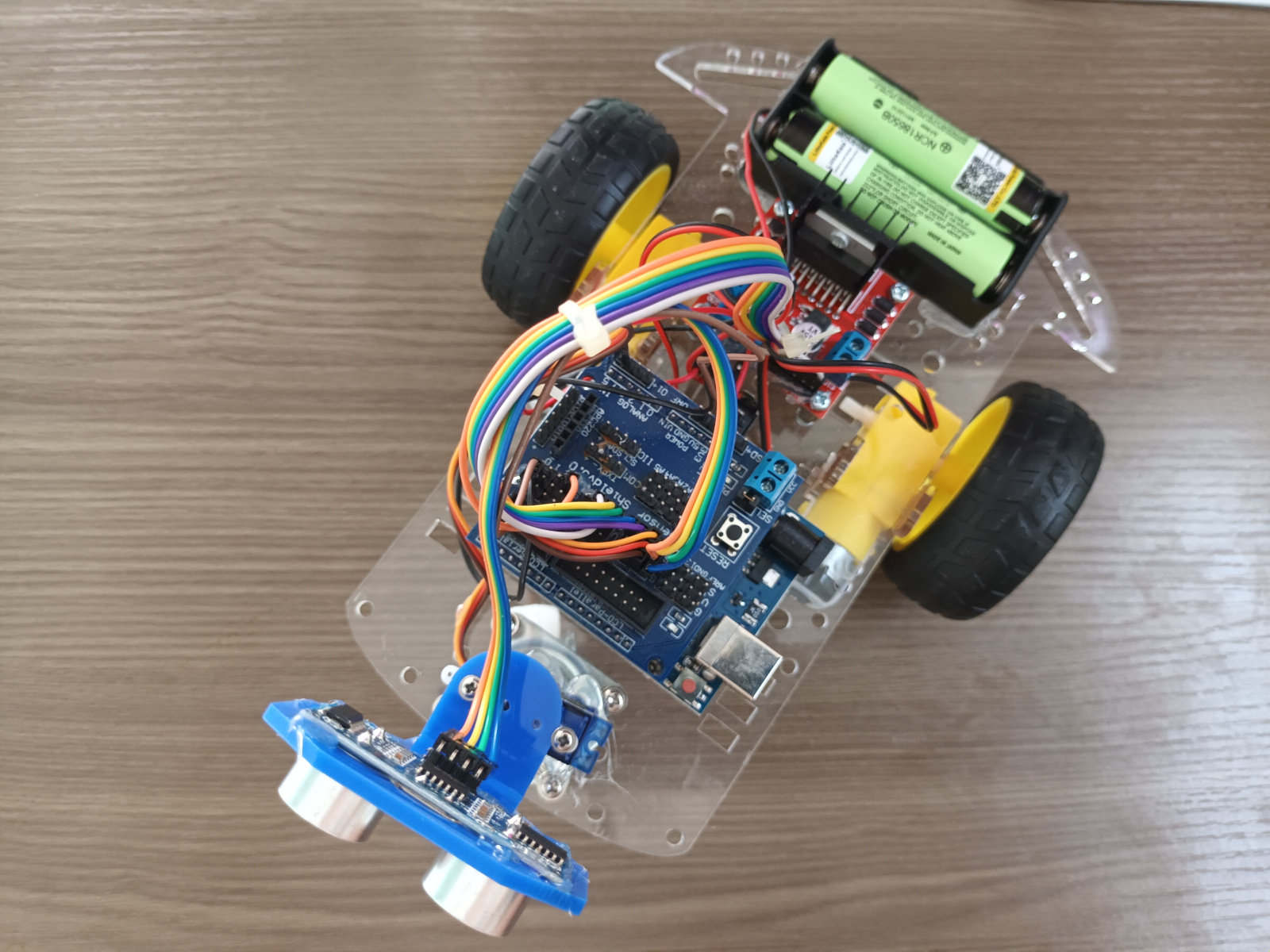
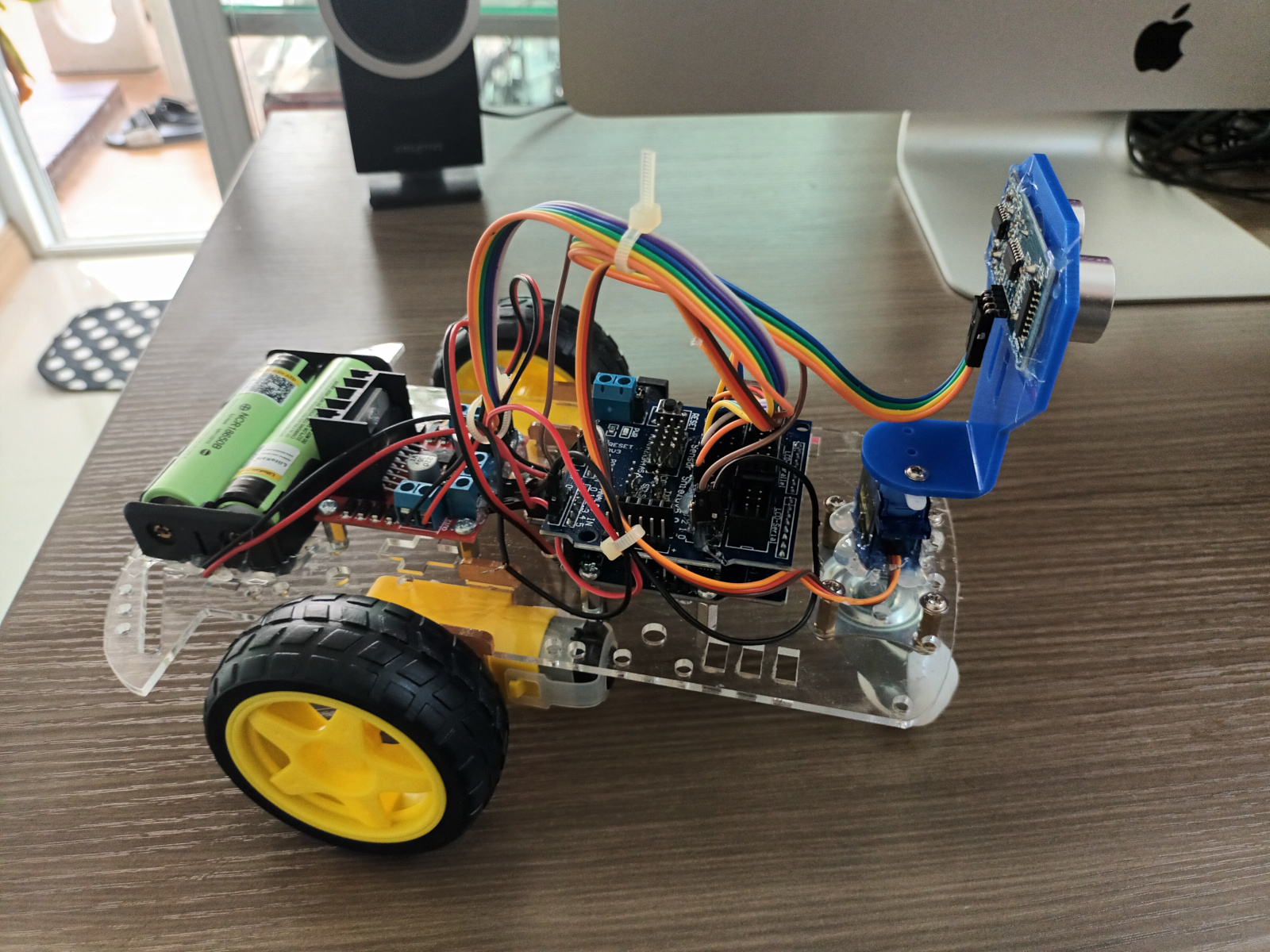
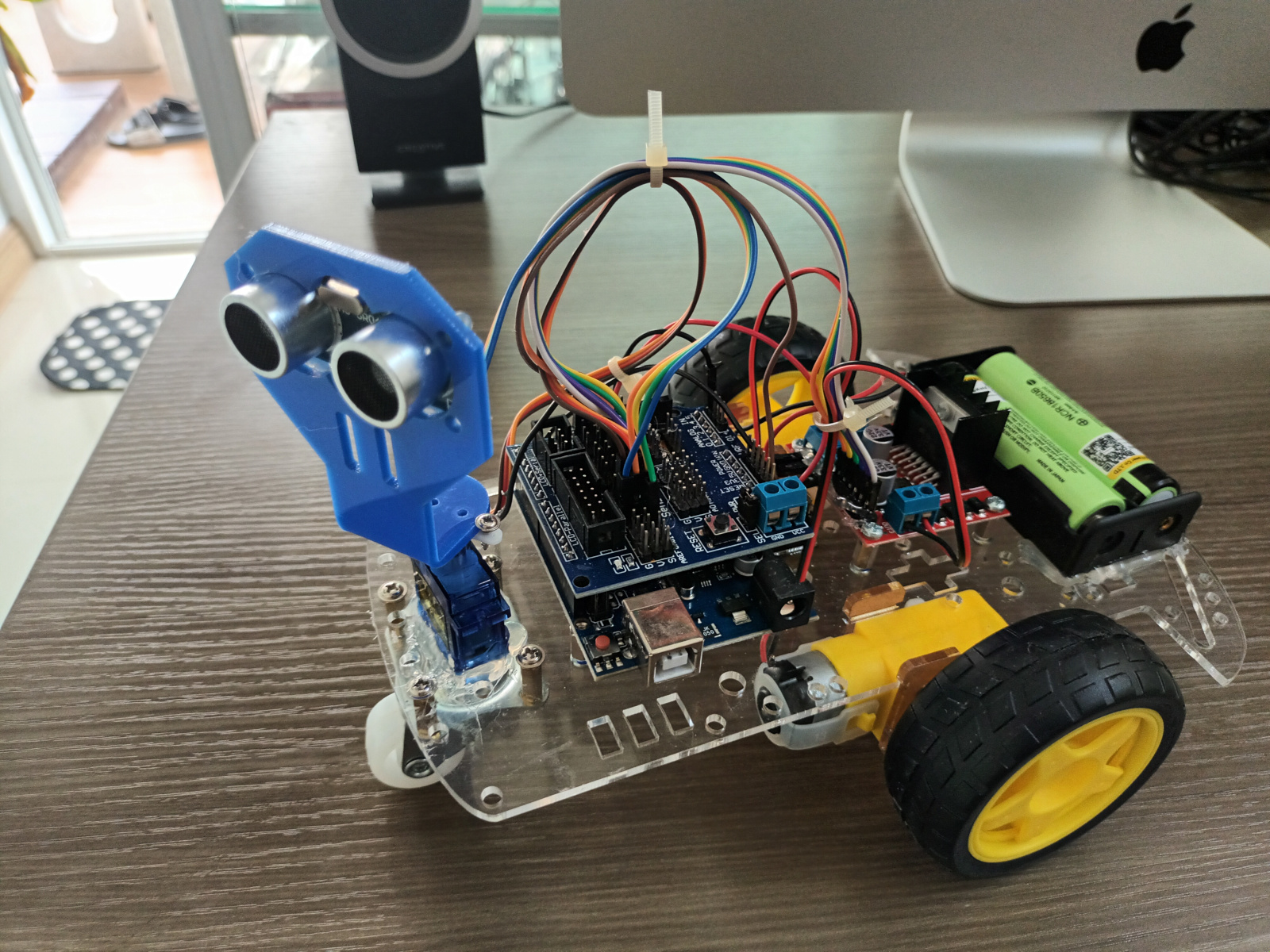
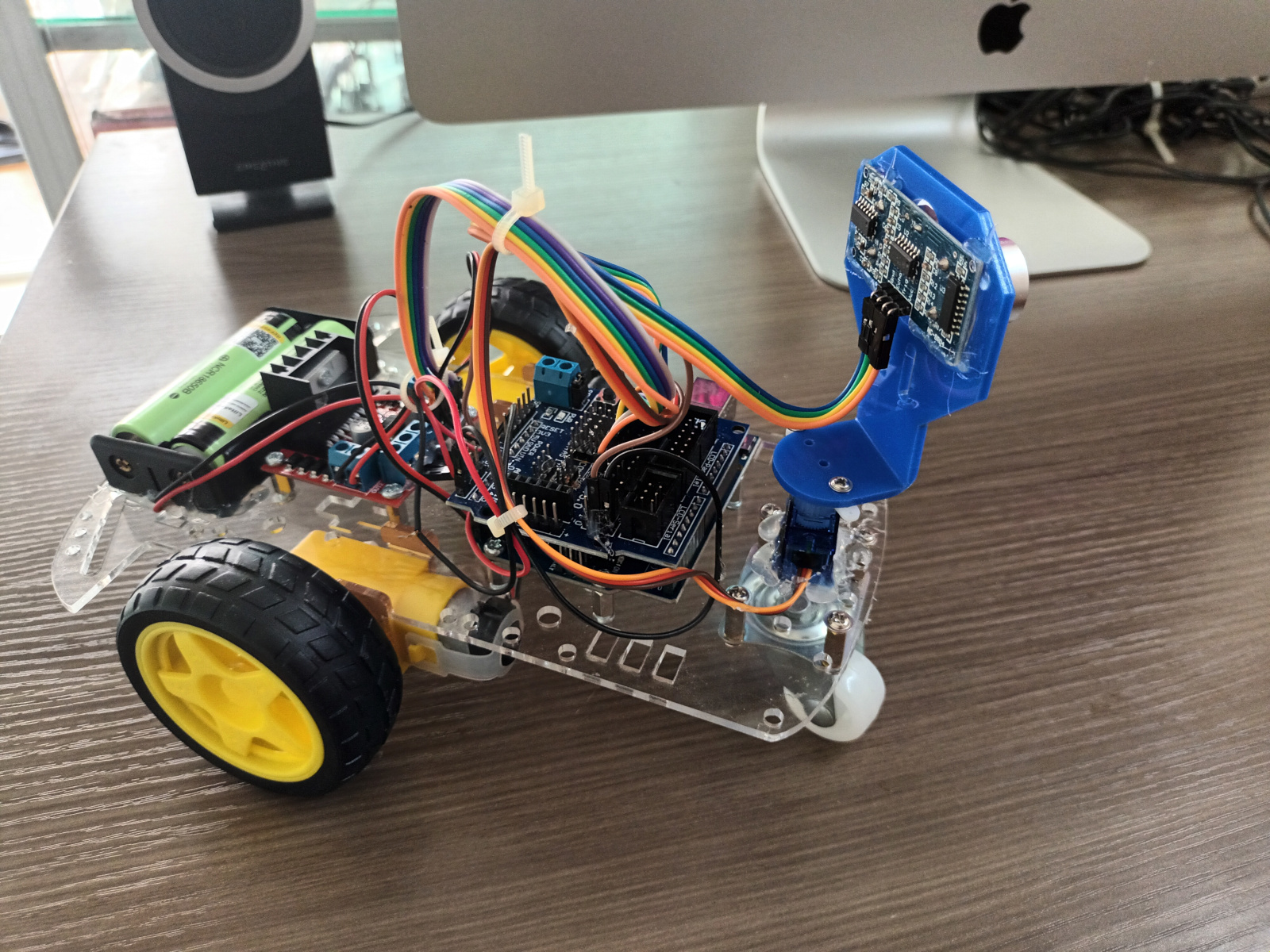
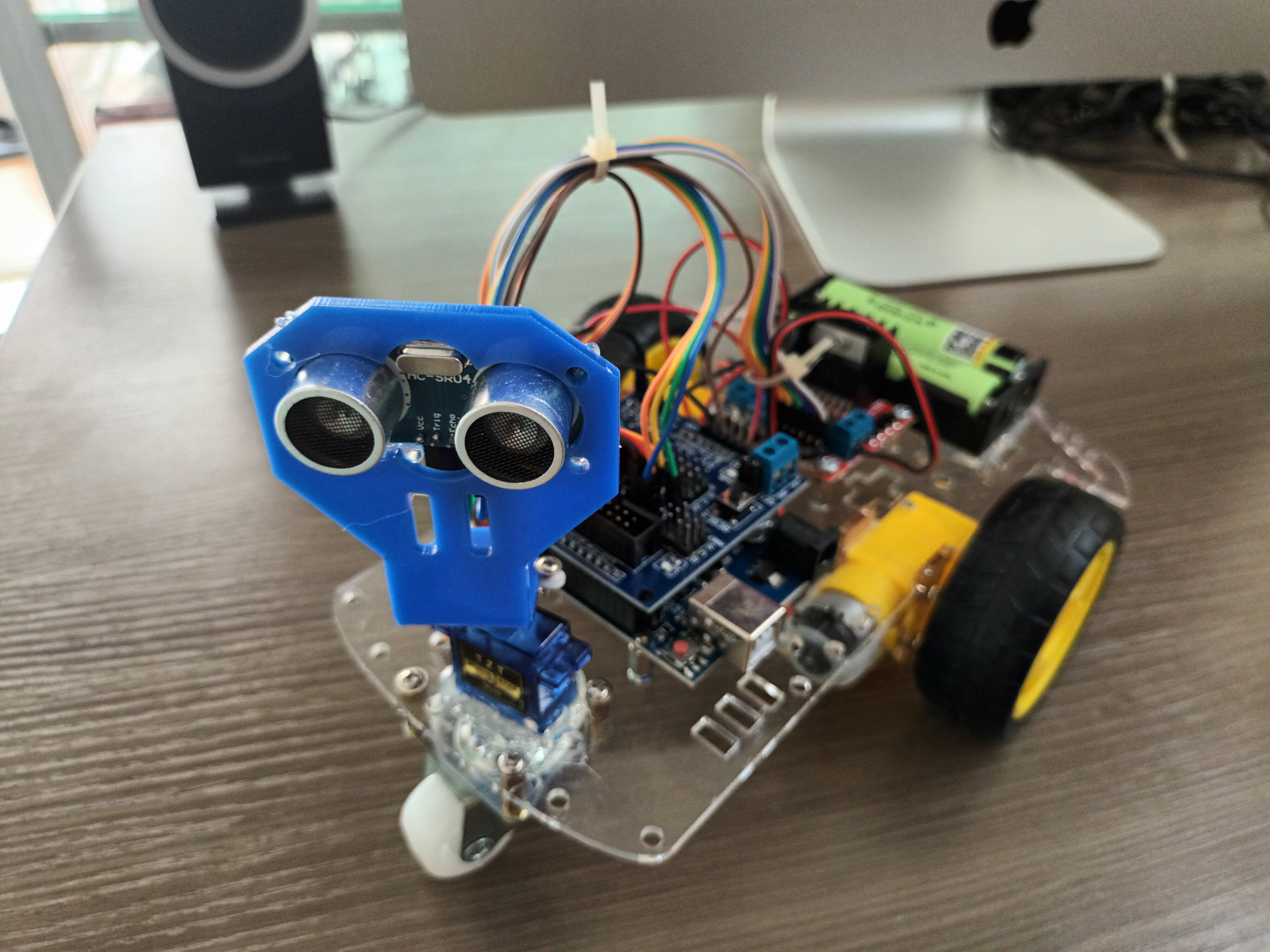
ชุดคิท หุ่นยนต์ Arduino หลบสิ่งกีดขวาง (Ultrasonic)
| รหัสสินค้า | KIT-0042 |
| หมวดหมู่ | ชุดหุ่นยนต์ Arduino |
| ราคาปกติ | |
| ลดเหลือ | 1,925.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |
หยิบลงตะกร้า

รายละเอียดสินค้า
การใช้เทคโนโลยีเพื่อสร้างหุ่นยนต์ที่สามารถหลบสิ่งกีดขวางเป็นหนึ่งในการประยุกต์ใช้การทำงานของหุ่นยนต์อย่างแม่นยำและมีประสิทธิภาพ เทคโนโลยี Ultrasonic Sensor HC-SR04 เป็นเครื่องมือที่สามารถช่วยให้หุ่นยนต์รับรู้และหลบสิ่งกีดขวางได้อย่างมีประสิทธิภาพ ในบทความนี้ เราจะสำรวจขั้นตอนการสร้างหุ่นยนต์ Arduino เพื่อหลบสิ่งกีดขวางด้วย Ultrasonic Sensor HC-SR04 รวมถึงแนวคิดและประโยชน์ของโปรเจคนี้ในชีวิตประจำวัน
( สั่งซื้อจำนวนมากติดต่อโทร : 095-226-2116 หรือ LINE ID : kensiam2016 )

วิดีโอผลลัพธ์การทำงาน หุ่นยนต์ Arduino หลบสิ่งกีดขวาง (Ultrasonic)
หลักการทำงาน
หลักการทำงานของหุ่นยนต์ Arduino ที่ใช้ Ultrasonic Sensor HC-SR04 เพื่อหลบสิ่งกีดขวางมีขั้นตอนหลักๆ ดังนี้:
- ตรวจจับระยะห่าง: เซ็นเซอร์ Ultrasonic HC-SR04 ใช้คลื่นเสียงสูงความถี่เพื่อส่งออกไปยังสิ่งกีดขวาง และรอการส่งกลับจากสิ่งกีดขวาง จากนั้นจะใช้เวลาที่ใช้ในการส่งกลับมาเพื่อคำนวณหาระยะห่างระหว่างหุ่นยนต์กับสิ่งกีดขวาง
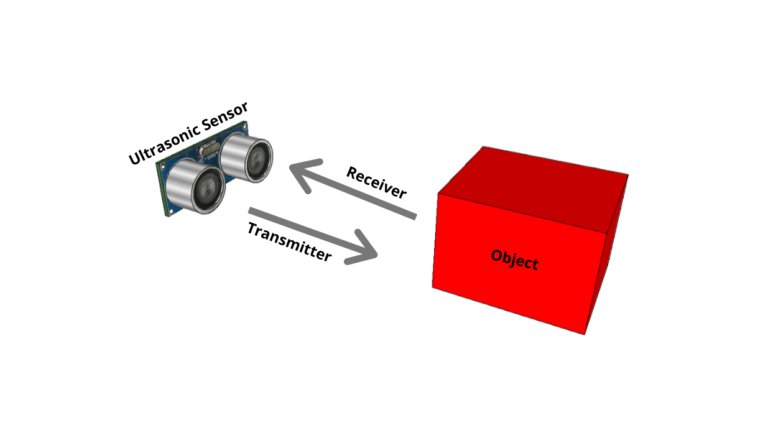
- การคำนวณระยะห่าง: เมื่อเซ็นเซอร์ได้รับสัญญาณกลับมา หุ่นยนต์ Arduino จะใช้เวลาที่ใช้ในการส่งกลับมาและความเร็วของเสียงในอากาศ (ประมาณ 340 เมตรต่อวินาที) เพื่อคำนวณหาระยะห่างจากสิ่งกีดขวาง
- การตัดสินใจ: หลังจากได้รับค่าระยะห่างระหว่างหุ่นยนต์กับสิ่งกีดขวางแล้ว หุ่นยนต์จะทำการตัดสินใจว่าจะเลี้ยวซ้ายหรือเลี้ยวขวาหรือหยุดเคลื่อนที่ เพื่อหลบสิ่งกีดขวาง โดยการตัดสินใจนี้จะขึ้นอยู่กับเงื่อนไขที่กำหนดไว้ในโปรแกรม
- การเคลื่อนที่: หลังจากที่ตัดสินใจแล้ว หุ่นยนต์จะทำการเคลื่อนที่ตามทิศทางที่เลือก ซึ่งอาจเป็นการหลบสิ่งกีดขวางไปทางด้านซ้ายหรือขวา หรือหยุดเคลื่อนที่เพื่อหลบสิ่งกีดขวาง
- การวนลูป: การทำงานของหุ่นยนต์จะเป็นการวนลูปอย่างต่อเนื่อง โดยตรวจสอบระยะห่างและตัดสินใจเพื่อการเคลื่อนที่ตลอดเวลาที่หุ่นยนต์กำลังทำงาน
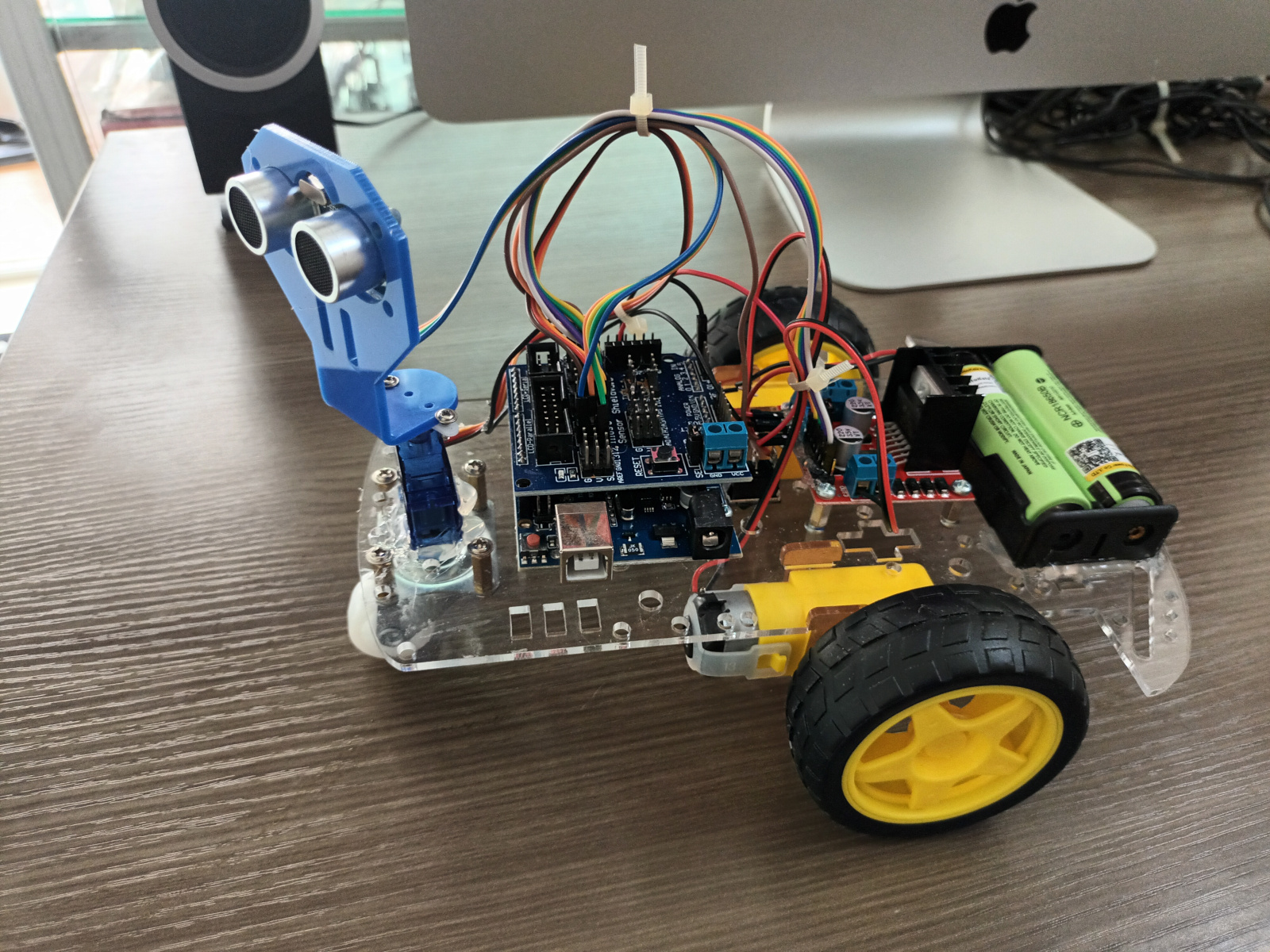
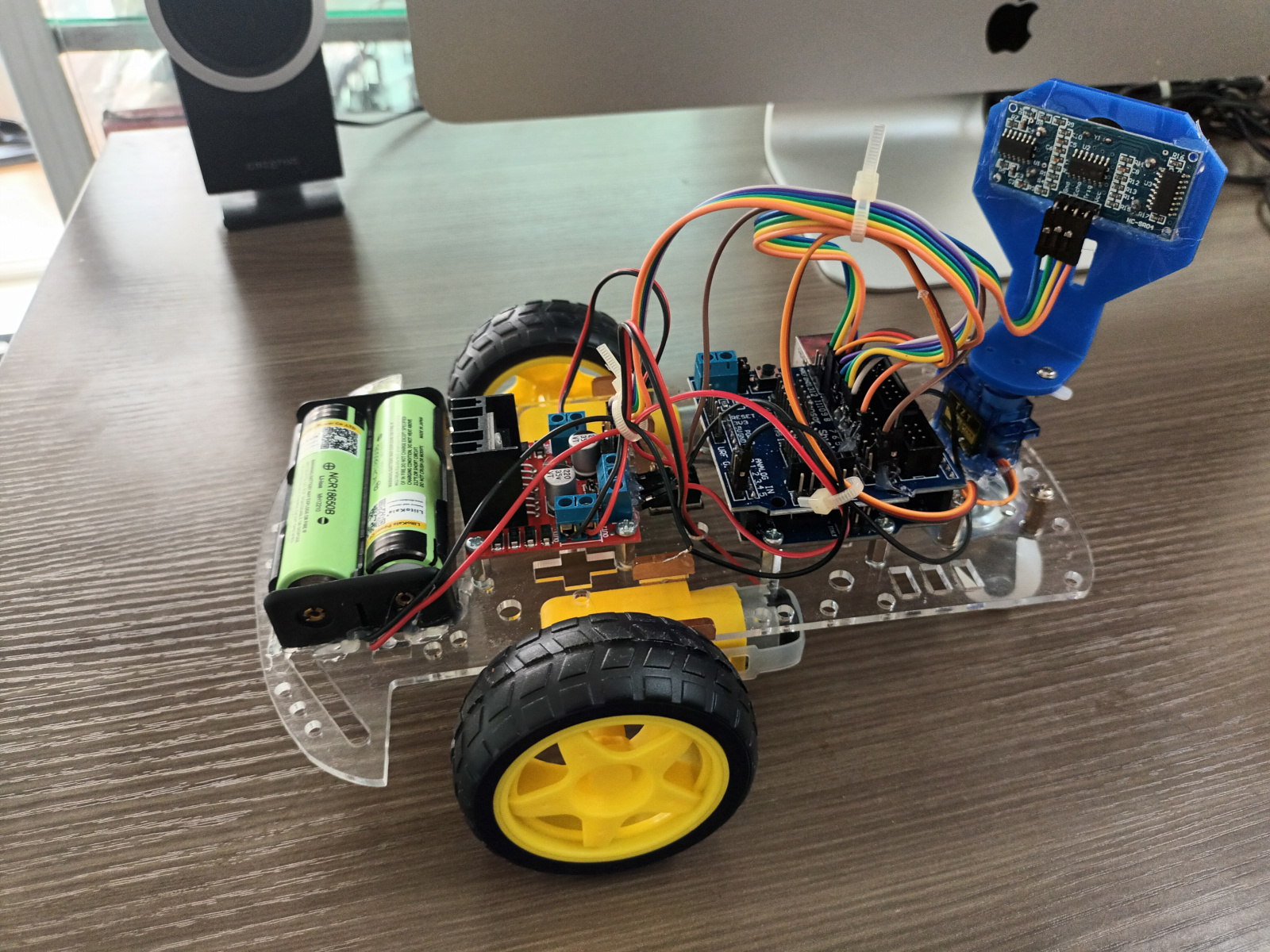
รายการอุปกรณ์
1. RB-0001 Arduino UNO R3
2. RB-0002 Sensor Shield V 5.0
3. RB-0003 Motor Driver Module L298N
4. RB-0015 Jumper (F2M) 20cm Female to Male
5. RB-0017 Jumper (F2F) 20cm Female to Female
6. RB-0019 รางถ่าน 18650 – 2 ก้อน
7. RB-0021 ถ่านชาร์จ 18650 NCR18650B 3.7v 3400mAh 2 ก้อน
8. RB-0023 2WD Smart Robot Car Chassis Kits
9. RB-0025 เสารองแผ่นพีซีบีโลหะแบบเหลี่ยม 8 mm
10. RB-0005 Ultrasonic Sensor HC-SR04
11. RB-0007 Mounting Bracket for HC-SR04 แบบยาว
12. RB-0008 SG90 Tower Pro Micro Servo motor 9g
ขั้นตอนการทําโปรเจค
สรุป
การสร้างหุ่นยนต์ Arduino เพื่อหลบสิ่งกีดขวางโดยใช้ Ultrasonic Sensor HC-SR04 มีข้อดีหลายประการดังนี้:
- ความมั่นใจในการเคลื่อนที่: การใช้ Ultrasonic Sensor ช่วยในการตรวจจับและวัดระยะห่างระหว่างหุ่นยนต์กับสิ่งกีดขวาง ช่วยเพิ่มความมั่นใจให้กับหุ่นยนต์ในการเคลื่อนที่และหลีกเลี่ยงสิ่งกีดขวางอย่างมีประสิทธิภาพ
- ประหยัดทรัพยากร: Ultrasonic Sensor เป็นอุปกรณ์ที่มีความสามารถในการทำงานในระยะทางไกลและมีราคาที่เหมาะสม ทำให้การสร้างหุ่นยนต์หลบสิ่งกีดขวางด้วย Ultrasonic Sensor เป็นเรื่องที่ประหยัดทรัพยากร
- ความยืดหยุ่นในการใช้งาน: Ultrasonic Sensor เป็นอุปกรณ์ที่มีความยืดหยุ่นในการใช้งาน สามารถปรับใช้ในหลากหลายสถานการณ์และงานที่ต้องการใช้งานระยะห่างระหว่างวัตถุ
- ความแม่นยำในการตรวจจับ: Ultrasonic Sensor เป็นเซนเซอร์ที่มีความแม่นยำในการตรวจจับระยะห่าง ทำให้หุ่นยนต์สามารถหลีกเลี่ยงสิ่งกีดขวางได้อย่างแม่นยำและปลอดภัย
- ความสามารถในการปรับแต่ง: หากต้องการเพิ่มความซับซ้อนในการตรวจจับและหลีกเลี่ยงสิ่งกีดขวาง สามารถปรับแต่งโค้ดและตั้งค่า Ultrasonic Sensor ได้ตามต้องการของโปรเจคและสถานการณ์ที่เจอ
ดังนั้น การใช้ Ultrasonic Sensor HC-SR04 ในการสร้างหุ่นยนต์ Arduino เพื่อหลบสิ่งกีดขวางเป็นวิธีที่มีประสิทธิภาพและคุ้มค่าที่สุดสำหรับโปรเจคหุ่นยนต์ที่ต้องการความแม่นยำและเชื่อถือได้ในการหลีกเลี่ยงสิ่งกีดขวางในสิ่งแวดล้อมที่หลากหลาย
วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
ระบบสมาชิก
เว็บเพื่อนบ้าน

 โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ



▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
จําหน่าย อุปกรณ์หุ่นยนต์ Arduino , ESP8266, ESP32 , STM32 , micro:bit , Paspberry Pi รับประกอบหุ่นยนต์ ชุดคิทหุ่นยนต์ ตัวอย่างโปรเจค IoT (Internet of Things) อินเทอร์เน็ตของสรรพสิ่ง
เบอร์โทร : 095-226-2116
อีเมล : robotsiam16@gmail.com
อีเมล : robotsiam16@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม