ชุดคิท หุ่นยนต์เดินตามเส้น 2 เซ็นเซอร์ ESP8266 V3




| รหัสสินค้า | KIT-0036 |
| หมวดหมู่ | ชุดหุ่นยนต์ ESP8266 |
| ราคาปกติ | |
| ลดเหลือ | 1,715.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |
หยิบลงตะกร้า

รายละเอียดสินค้า
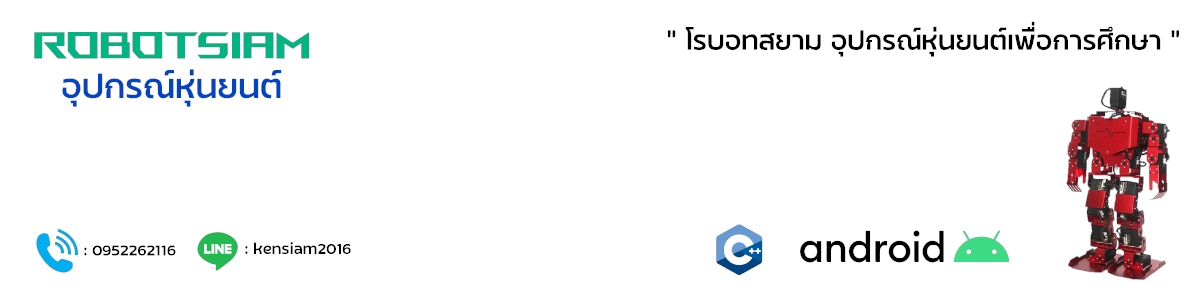
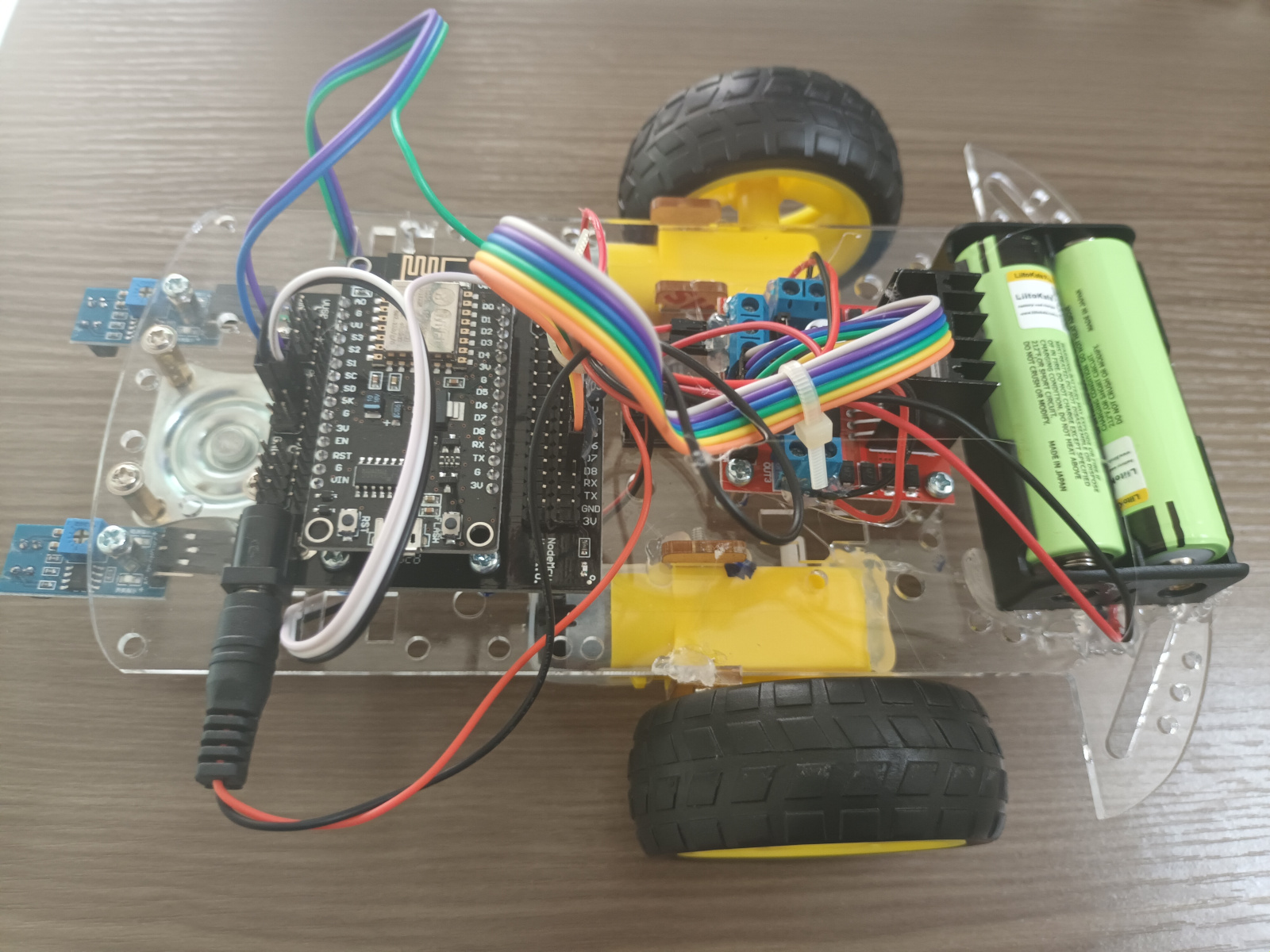
ชุดคิท หุ่นยนต์เดินตามเส้น 2 เซ็นเซอร์ ESP8266 แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)
หุ่นยนต์ที่สามารถเดินตามเส้นด้วยการใช้เซ็นเซอร์ 2 ตัวและ ESP8266 เป็นหนึ่งในโครงการที่น่าสนใจอย่างมากในโลกของหุ่นยนต์ที่ทำงานตามคำสั่ง. การสร้างหุ่นยนต์ที่สามารถเดินตามเส้นนั้นเป็นทักษะที่สำคัญที่นักพัฒนาหุ่นยนต์ต้องมีเพื่อให้หุ่นยนต์สามารถเคลื่อนที่ได้ในสิ่งแวดล้อมได้อย่างมีประสิทธิภาพและปลอดภัย.
( สั่งซื้อจำนวนมากติดต่อโทร : 095-226-2116 หรือ LINE ID : kensiam2016 )
วิดีโอผลลัพธ์การทำงาน หุ่นยนต์เดินตามเส้น 2 เซ็นเซอร์ ESP8266 V3
เทคโนโลยีและอุปกรณ์ที่ใช้
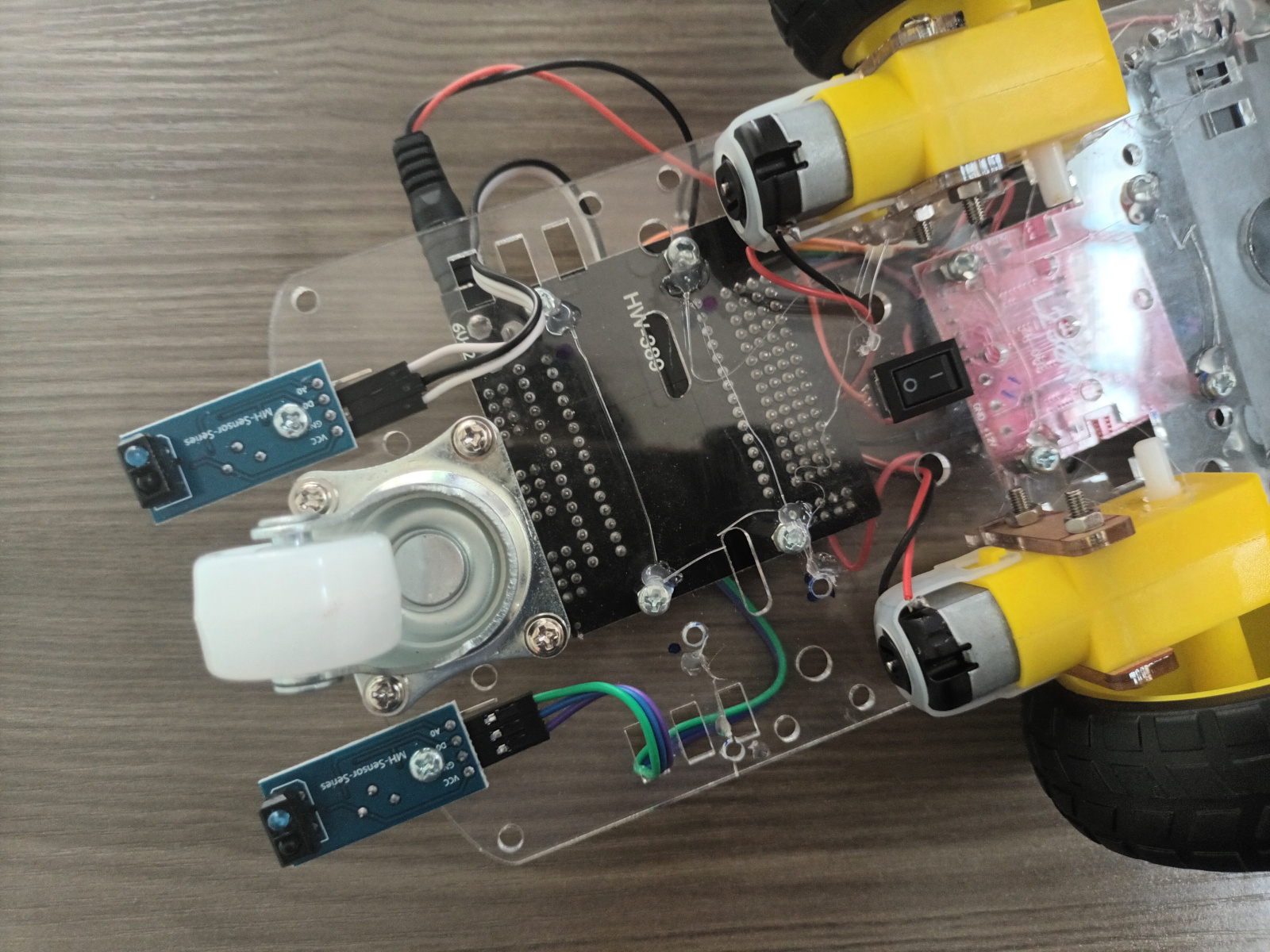
- เซ็นเซอร์เลเซอร์ (Line Sensor): เป็นเซ็นเซอร์ที่ใช้สำหรับตรวจจับเส้นทาง โดยสามารถตรวจจับเส้นทางที่มีสีคงที่เช่นดำหรือเทาได้ มักใช้ในการนำหุ่นยนต์เดินตามเส้น
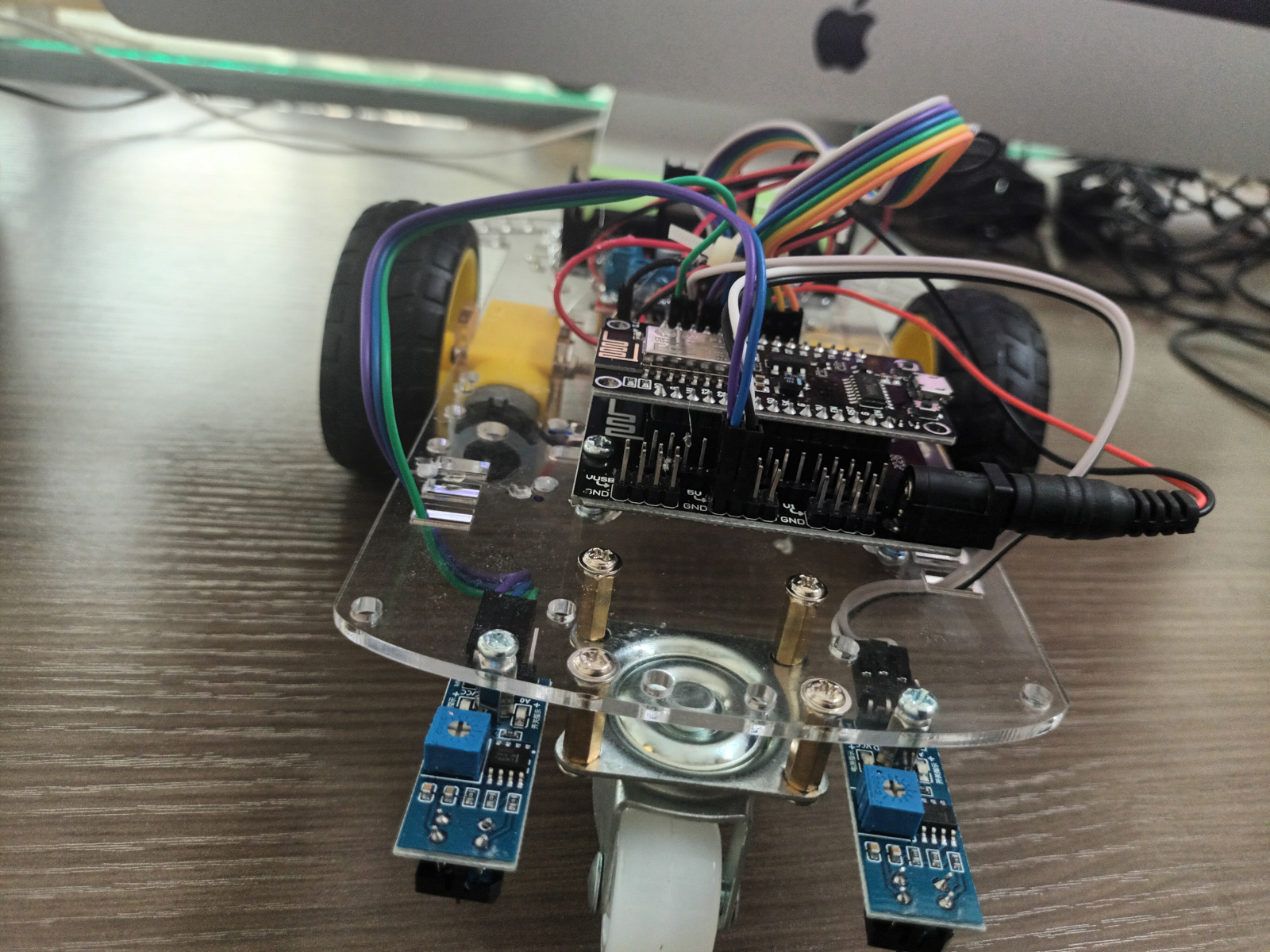
- บอร์ด ESP8266: เป็นบอร์ดไมโครคอนโทรเลอร์ที่มีความสามารถมากมาย เช่น การเชื่อมต่อ WiFi และการประมวลผลที่เร็วและมีประสิทธิภาพ
- Arduino IDE: เป็นโปรแกรมที่ใช้ในการเขียนและอัปโหลดโค้ดลงในบอร์ด ESP8266 ซึ่งมีความสะดวกและใช้งานง่ายสำหรับผู้เริ่มต้น
หลักการทำงานพื้นฐาน
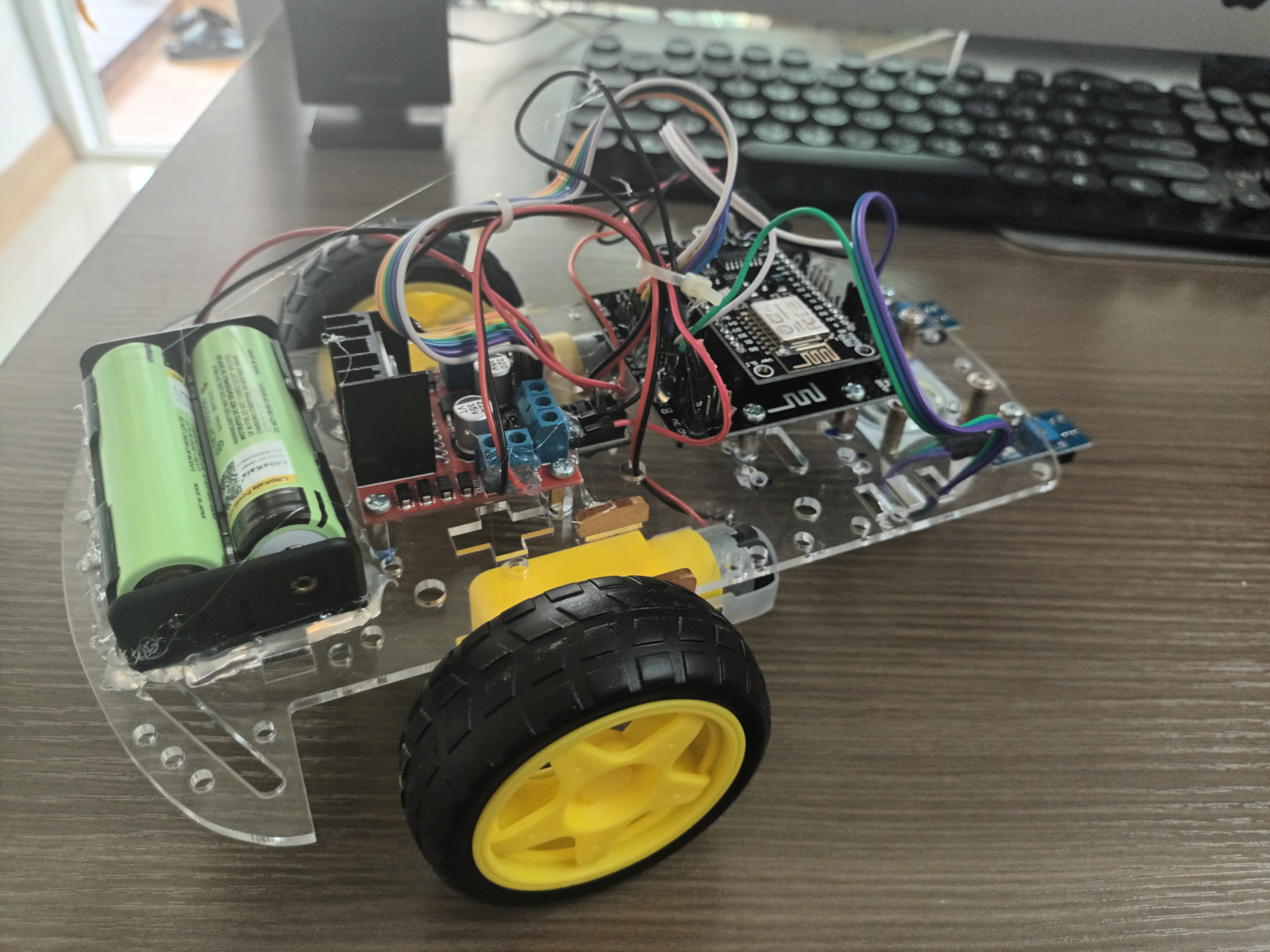
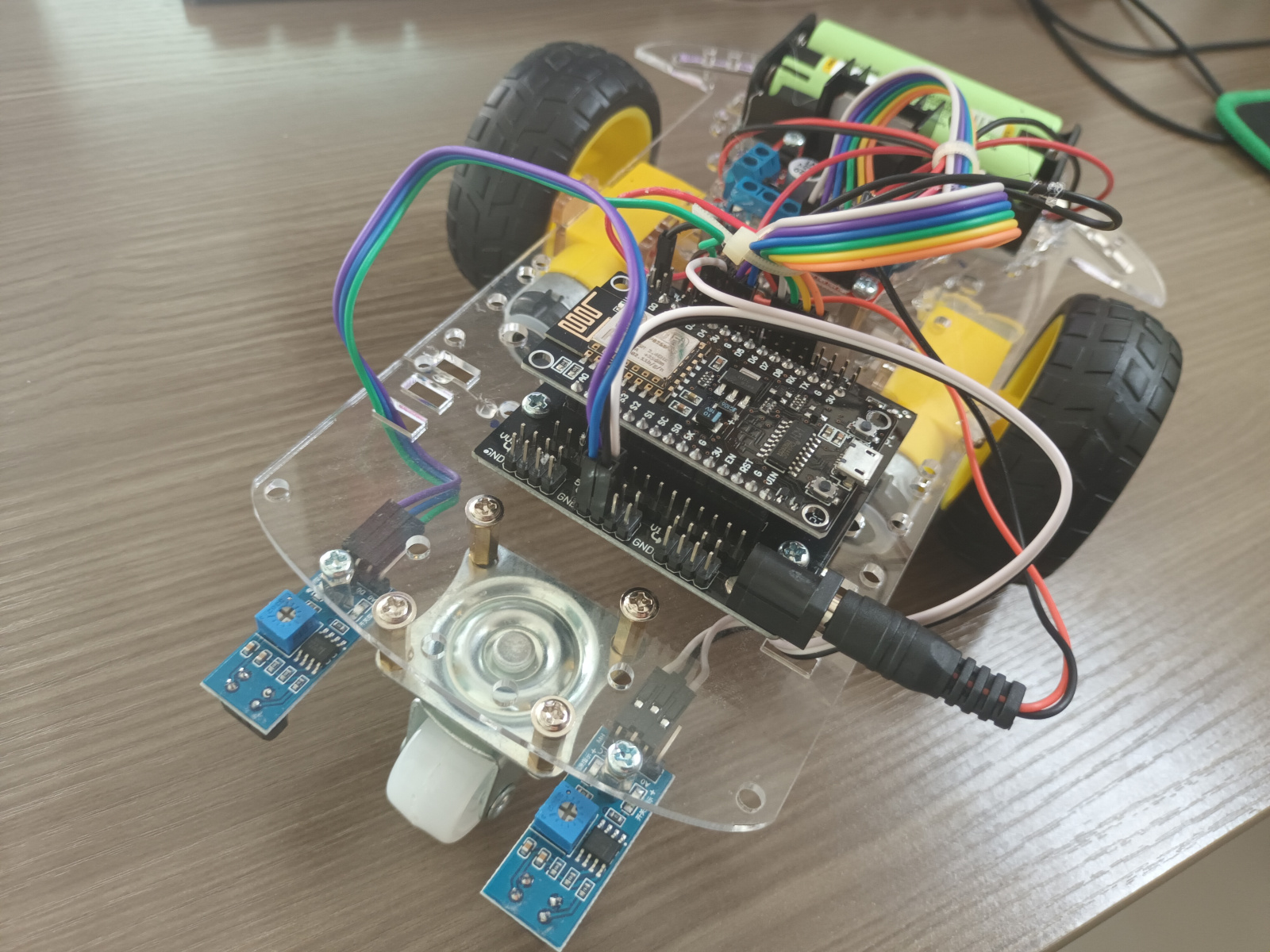
- การตรวจจับเส้นทาง: สองเซ็นเซอร์จะถูกติดตั้งด้านล่างของหุ่นยนต์โดยใช้หลักการของเซ็นเซอร์ไลน์ สองเซ็นเซอร์นี้จะตรวจจับสีหรือความสว่างบนพื้นผิว หรืออาจใช้เทคนิคการตรวจจับขอบของเส้นทาง เมื่อเซ็นเซอร์ตรวจจับสีของเส้นทางหรือขอบของเส้นทางได้ มันจะส่งข้อมูลไปยังไมโครคอนโทรลเลอร์ ESP8266 สำหรับการประมวลผลต่อไป
- การประมวลผลข้อมูล: ข้อมูลที่ได้จากเซ็นเซอร์จะถูกส่งไปยังไมโครคอนโทรลเลอร์เพื่อการประมวลผล เช่น การตรวจจับเส้นทางและปรับค่าของมอเตอร์เพื่อให้หุ่นยนต์เดินตามเส้นทางที่ตรวจจับได้
- การควบคุมการเคลื่อนที่: โดยใช้ข้อมูลที่ได้จากการประมวลผล เมื่อเซ็นเซอร์ตรวจจับว่าหุ่นยนต์ไกลออกไปจากเส้นทาง ระบบควบคุมจะสั่งให้มอเตอร์หรือของติดตัวหุ่นยนต์ทำการปรับเพื่อให้กลับมาสู่เส้นทาง
- การปรับค่าและประสิทธิภาพ: ระบบสามารถปรับค่าต่างๆ เช่น ความไวของหุ่นยนต์ในการตอบสนองต่อการตรวจจับเส้นทาง เพื่อควบคุมการเคลื่อนที่เพื่อเพิ่มประสิทธิภาพในการตามเส้นทาง
- ผลลัพธ์ของการทำงานนี้คือหุ่นยนต์ที่สามารถเดินตามเส้นทางได้อย่างแม่นยำและมีประสิทธิภาพ โดยใช้เซ็นเซอร์ เป็นส่วนหนึ่งของระบบการตรวจจับและควบคุมในการเดินของหุ่นยนต์นั้นๆ
รายการอุปกรณ์
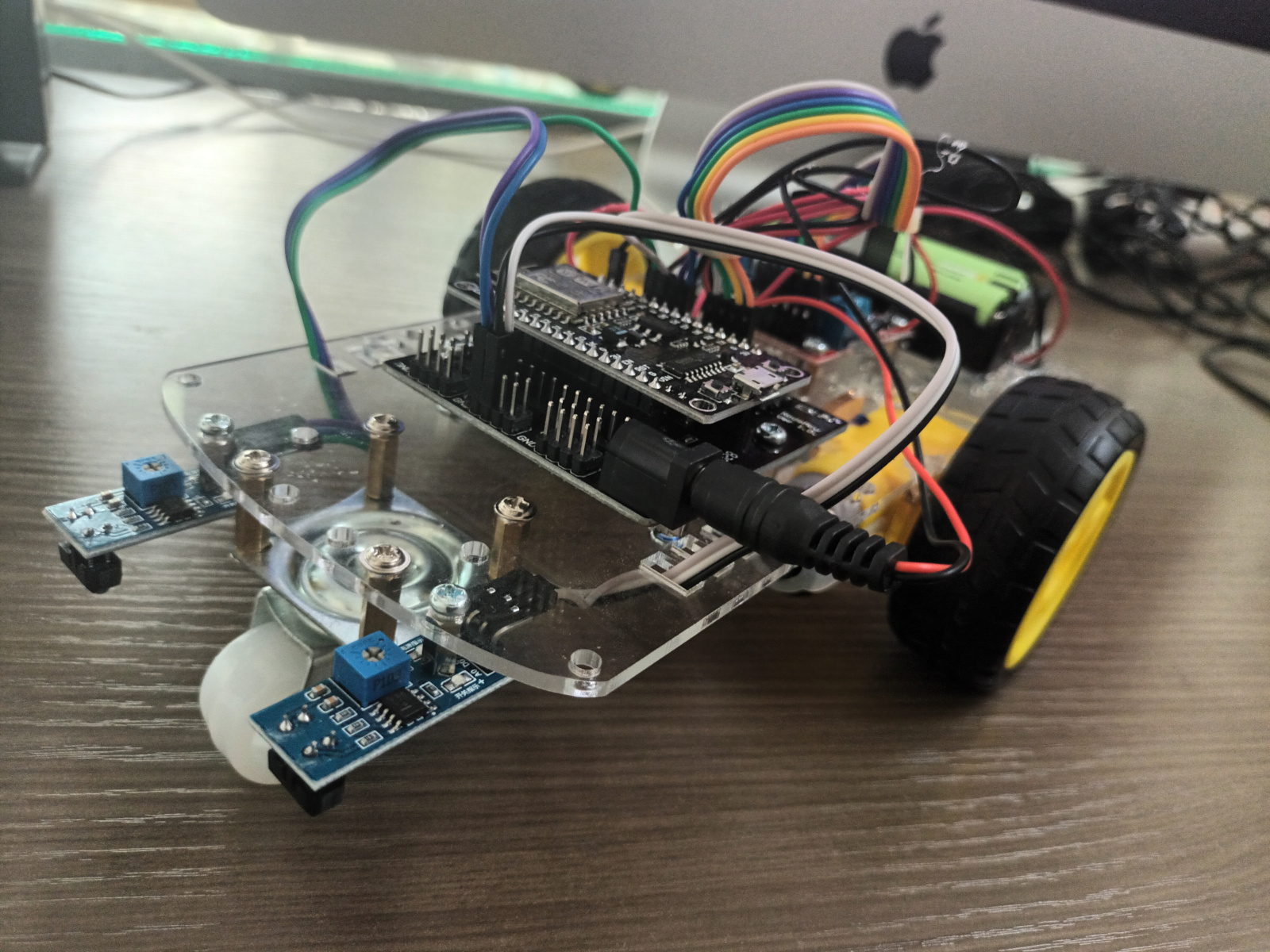
1. RB-0023 2WD Smart Robot Car Chassis Kits
2. RB-0108 NodeMCU V3 CH340G Lua WIFI ESP8266 ESP-12E
3. RB-0109 NodeMcu Breadboard for NodeMCU V3
4. RB-0106 Micro USB Cable Wire 1m for NodeMCU
5. RB-0003 Motor Driver Module L298N
6. RB-0015 Jumper (F2M) cable wire 20cm Female to Male
7. RB-0017 Jumper (F2F) cable wire 20cm Female to Female
8. RB-0019 รางถ่าน 18650 – 2 ก้อน
9. RB-0021 ถ่านชาร์จ 18650 NCR18650B 3.7v 3400mAh 2 ก้อน
10. RB-0049 แจ๊กขั้วถ่าน 9 โวลต์ สำหรับ Ardiuno
11. RB-0025 เสารองแผ่นพีซีบีโลหะแบบเหลี่ยม 8 mm
12. RB-0288 TCRT5000 Tracing Infrared Reflectance Sensor 2 ตัว
สรุป
การสร้างหุ่นยนต์เดินตามเส้นด้วยการใช้เซ็นเซอร์ 2 ตัว ESP8266 ด้วย Arduino IDE มีข้อดีหลายประการดังนี้:
- ความสะดวกและเข้าถึงง่าย: Arduino IDE เป็นเครื่องมือที่ใช้งานง่ายและได้รับความนิยมสูงสุดในการพัฒนาโครงการอิเล็กทรอนิกส์ เป็นที่นิยมมากในการพัฒนาหุ่นยนต์และโปรเจกต์อื่น ๆ ที่เกี่ยวข้องกับการควบคุมแบบอัตโนมัติ
- การเซ็นเซอร์ 2 ตัว: การใช้เซ็นเซอร์ 2 ตัวช่วยให้หุ่นยนต์สามารถตรวจจับเส้นทางได้อย่างแม่นยำและเชื่อถือได้ ซึ่งช่วยให้หุ่นยนต์เดินตามเส้นได้อย่างมีประสิทธิภาพและเสถียร
- ความยืดหยุ่นในการปรับแต่ง: การใช้ Arduino IDE และ ESP8266 ช่วยให้ผู้ใช้สามารถปรับแต่งและปรับปรุงโครงการได้ตามต้องการ ซึ่งมีความยืดหยุ่นในการพัฒนาและปรับปรุงโครงการต่อไปให้สอดคล้องกับความต้องการของผู้ใช้ได้อย่างเหมาะสม
- เรียนรู้การโปรแกรม: การสร้างหุ่นยนต์ตามเส้นต้องใช้การโปรแกรมเพื่อควบคุมพฤติกรรมของหุ่นยนต์ การเรียนรู้การเขียนโค้ดด้วย Arduino IDE และการใช้ ESP8266 จะช่วยพัฒนาทักษะการโปรแกรมอย่างมีประสิทธิภาพ
- เรียนรู้การใช้งานเซ็นเซอร์: การสร้างหุ่นยนต์เดินตามเส้นต้องใช้เซ็นเซอร์เพื่อตรวจจับเส้นทาง ผู้เรียนจะได้เรียนรู้เกี่ยวกับการใช้งานเซ็นเซอร์และการปรับแต่งการตรวจจับให้เหมาะสมกับเงื่อนไขการทำงาน
- เรียนรู้การปรับแต่งและการแก้ปัญหา: การสร้างหุ่นยนต์เดินตามเส้นอาจเกิดปัญหาและความไม่แม่นยำขึ้นในการทำงาน ผู้เรียนจะได้เรียนรู้การแก้ปัญหาและการปรับแต่งโค้ดเพื่อปรับปรุงประสิทธิภาพของหุ่นยนต์
- เรียนรู้การทำงานทีม: การสร้างหุ่นยนต์เดินตามเส้นอาจเป็นโครงการที่ต้องทำงานร่วมกับผู้อื่น เช่น การแบ่งหน้าที่ในการพัฒนา การแก้ไขปัญหาร่วมกัน การสร้างและทดสอบโค้ด ซึ่งจะช่วยพัฒนาทักษะในการทำงานทีมและการสื่อสารในการทำงานร่วมกัน
วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
ระบบสมาชิก
เว็บเพื่อนบ้าน

 โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ



▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
จําหน่าย อุปกรณ์หุ่นยนต์ Arduino , ESP8266, ESP32 , STM32 , micro:bit , Paspberry Pi รับประกอบหุ่นยนต์ ชุดคิทหุ่นยนต์ ตัวอย่างโปรเจค IoT (Internet of Things) อินเทอร์เน็ตของสรรพสิ่ง
เบอร์โทร : 095-226-2116
อีเมล : robotsiam16@gmail.com
อีเมล : robotsiam16@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม