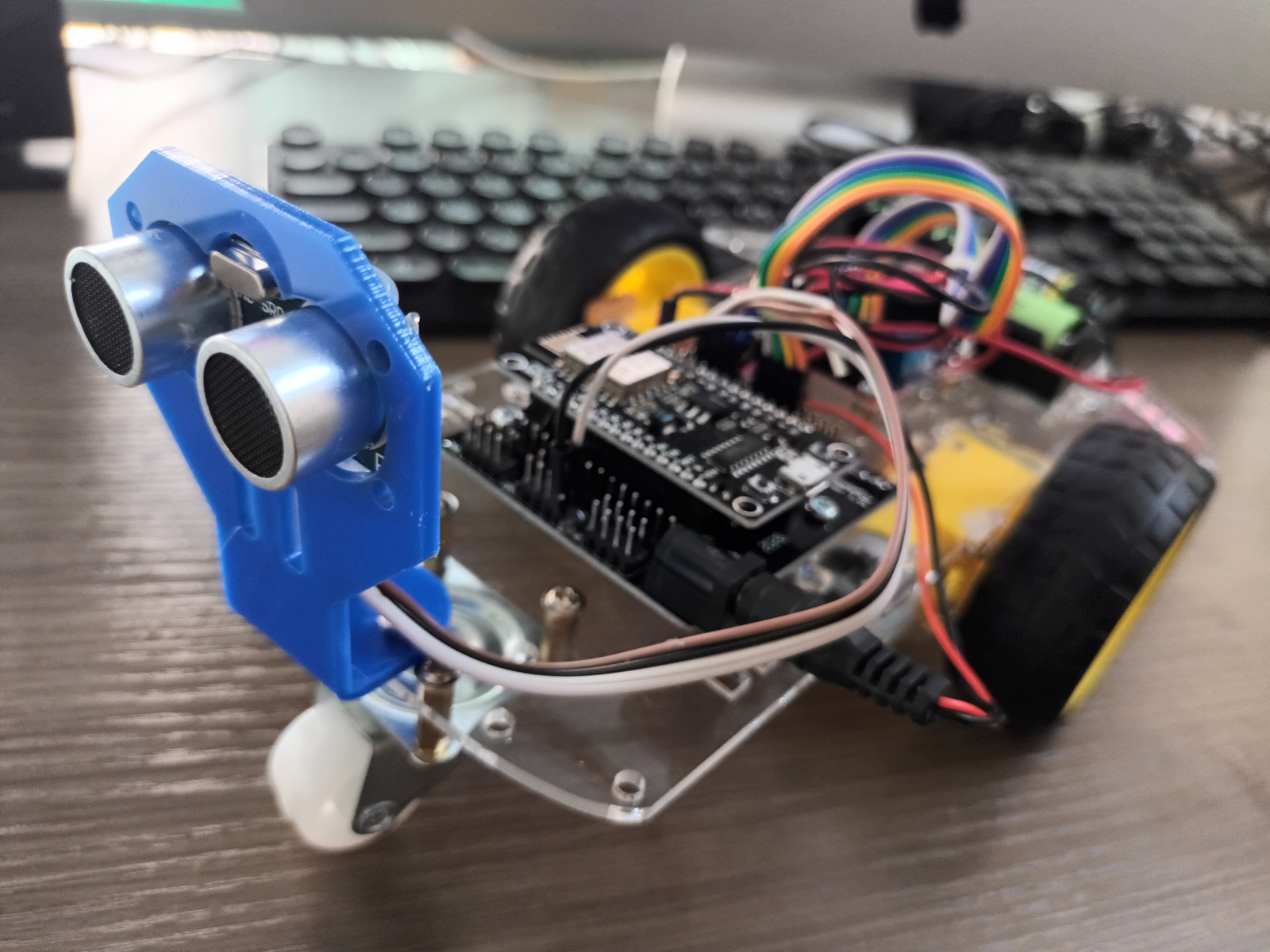
ชุดคิท หุ่นยนต์หลบสิ่งกีดขวาง ESP8266 V3
| รหัสสินค้า | KIT-0037 |
| หมวดหมู่ | ชุดหุ่นยนต์ ESP8266 |
| ราคาปกติ | |
| ลดเหลือ | 1,720.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |
หยิบลงตะกร้า

รายละเอียดสินค้า
การพัฒนาหุ่นยนต์เพื่อใช้ในการนำทางหรือการเคลื่อนที่อัตโนมัติเป็นหนึ่งในโครงการที่ท้าทายและน่าทึ่งสำหรับนักพัฒนาและผู้สนใจในด้านเทคโนโลยี หุ่นยนต์ที่สามารถหลบสิ่งกีดขวางอย่างแม่นยำและปลอดภัยจะเป็นประโยชน์อย่างมากในหลายสถานการณ์ เช่น ในงานอุตสาหกรรมหรือการใช้งานในสถานที่ที่ต้องการการเคลื่อนที่อัตโนมัติโดยเฉพาะ
ในบทความนี้เราจะสร้างหุ่นยนต์โดยใช้ ESP8266 และ Arduino IDE ซึ่งเป็นสิ่งที่ทุกคนสามารถทำได้ด้วยความรู้พื้นฐานในการเขียนโปรแกรมและการใช้งานไมโครคอนโทรลเลอร์อย่าง ESP8266โดยเฉพาะ
( สั่งซื้อจำนวนมากติดต่อโทร : 095-226-2116 หรือ LINE ID : kensiam2016 )
 วิดีโอผลลัพธ์การทำงาน หุ่นยนต์หลบสิ่งกีดขวาง ESP8266 V3
วิดีโอผลลัพธ์การทำงาน หุ่นยนต์หลบสิ่งกีดขวาง ESP8266 V3
หลักการทำงานของ หุ่นยนต์หลบสิ่งกีดขวาง ESP8266
หลักการทำงานของหุ่นยนต์หลบสิ่งกีดขวาง ESP8266 นั้นเรียกว่า “หุ่นยนต์อัจฉริยะ” หรือ “หุ่นยนต์เลี่ยงสิ่งกีดขวาง” (obstacle-avoidance robot) ซึ่งมีการทำงานอย่างน่าสนใจและเป็นประโยชน์ในการป้องกันการชนกับสิ่งกีดขวางในการเคลื่อนที่ หลักการทำงานของหุ่นยนต์นี้สามารถอธิบายได้ดังนี้:
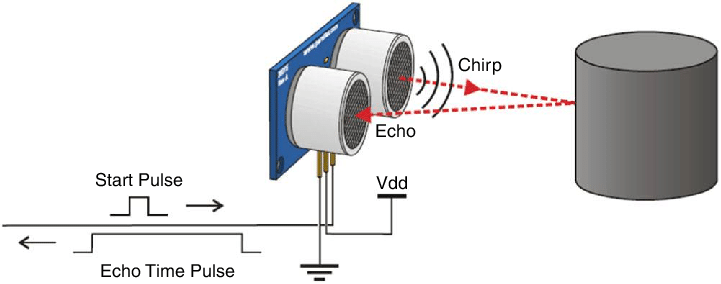
- ตรวจจับสิ่งกีดขวาง: หุ่นยนต์มีเซนเซอร์อินฟราเรด ติดตั้งด้านหน้าเพื่อตรวจจับสิ่งกีดขวาง ซึ่งเซนเซอร์จะส่งสัญญาณอินฟราเรดออกไปและวัดระยะห่างจากสิ่งกีดขวาง หากมีสิ่งกีดขวางอยู่ใกล้เซนเซอร์ สัญญาณที่ส่งออกจะถูกสะท้อนกลับมาเข้าสู่เซนเซอร์ ซึ่งหุ่นยนต์จะรับรู้และตรวจจับสิ่งกีดขวางด้วยการวัดและวิเคราะห์ข้อมูลจากเซนเซอร์นี้
- การตัดสินใจและการทำปฏิบัติ: เมื่อหุ่นยนต์ตรวจจับสิ่งกีดขวาง มันจะทำการตัดสินใจเกี่ยวกับการทำปฏิบัติที่เหมาะสมในสถานการณ์นั้น ๆ หากมีสิ่งกีดขวางอยู่ข้างหน้า หุ่นยนต์จะทำการหลบหลีกหรือหยุดเคลื่อนที่และรอให้สิ่งกีดขวางผ่านไปก่อนที่จะดำเนินการเดินทางต่อ
- ควบคุมการเคลื่อนที่: หลังจากที่หุ่นยนต์ตัดสินใจและกำหนดการทำปฏิบัติแล้ว มันจะใช้มอเตอร์ ( DC motor) เพื่อเคลื่อนที่ โดยการเปลี่ยนแปลงความเร็วและทิศทางของมอเตอร์ให้เหมาะสมเพื่อหลีกเลี่ยงสิ่งกีดขวางอย่างปลอดภัย
- รีเสวนาและปรับปรุง: หลังจากการหลบหลีกสิ่งกีดขวางสำเร็จแล้ว หุ่นยนต์อาจทำการรีเสวนาและปรับปรุงการทำงานของตนเพื่อป้องกันการชนกับสิ่งกีดขวางในอนาคตโดยใช้ข้อมูลที่ได้รับจากเซนเซอร์และประสบการณ์ที่เกิดขึ้น
- ดังนั้น หุ่นยนต์หลบสิ่งกีดขวาง ESP8266 มีความสำคัญในการนำเสนอเทคโนโลยีที่มีความสามารถในการรับมือกับสถานการณ์ของโลกแบบอัตโนมัติและอย่างอัจฉริยะ ทำให้เป็นที่น่าสนใจและมีความสำเร็จในการป้องกันการชนกับสิ่งกีดขวางในสภาพแวดล้อมต่าง ๆ ที่หลากหลาย
รายการอุปกรณ์
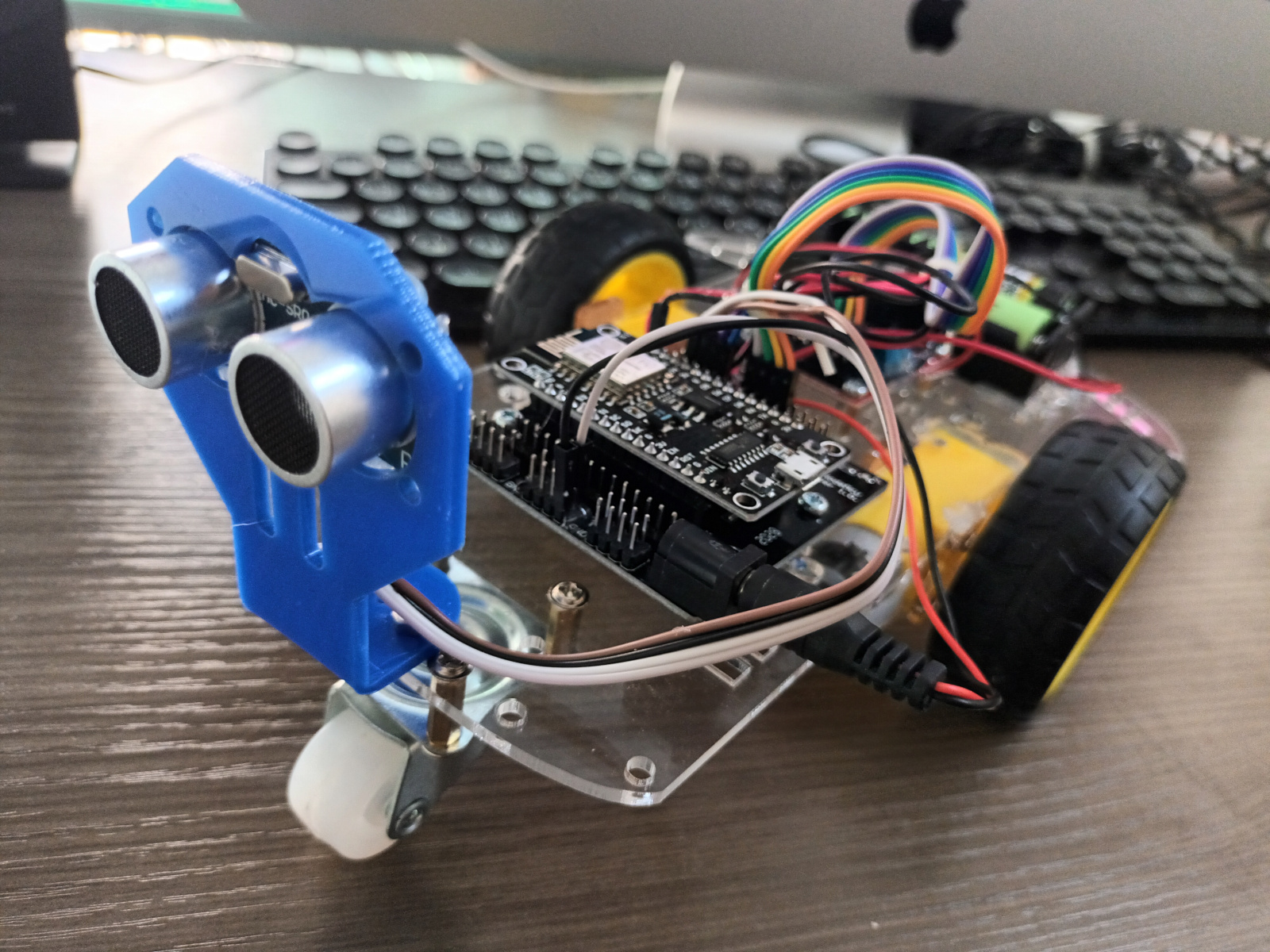
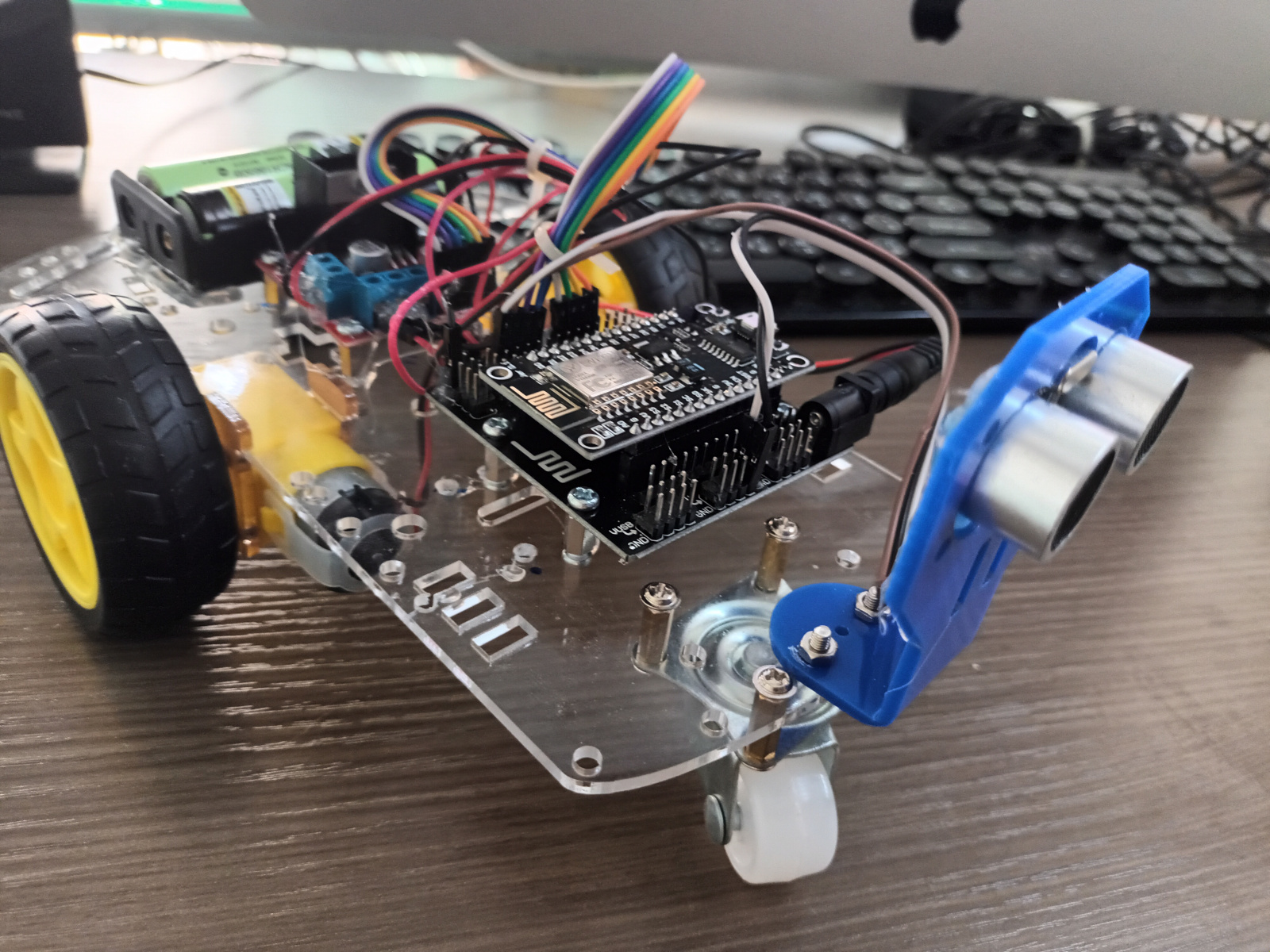
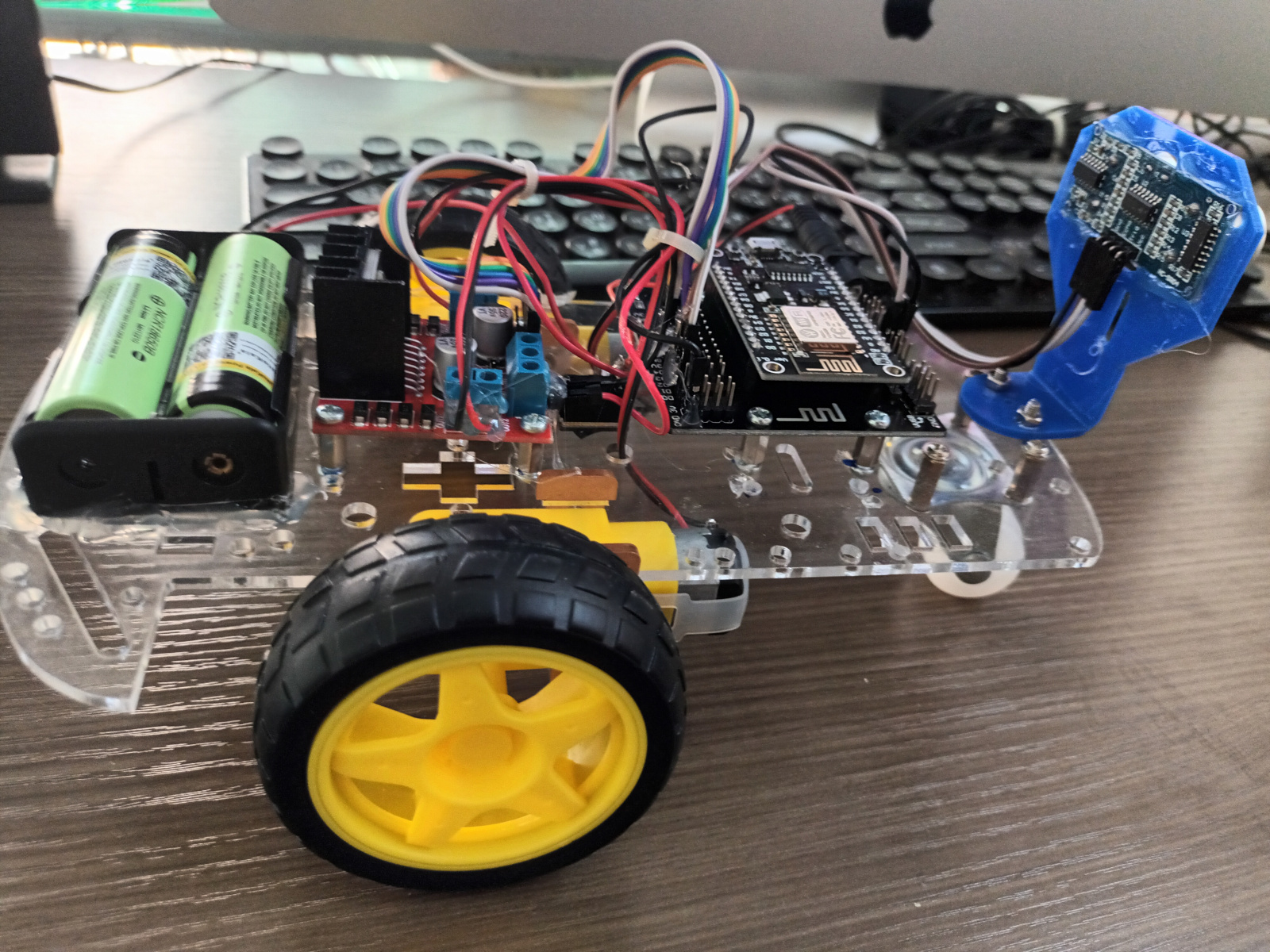
1. RB-0023 2WD Smart Robot Car Chassis Kits
1. RB-0023 2WD Smart Robot Car Chassis Kits
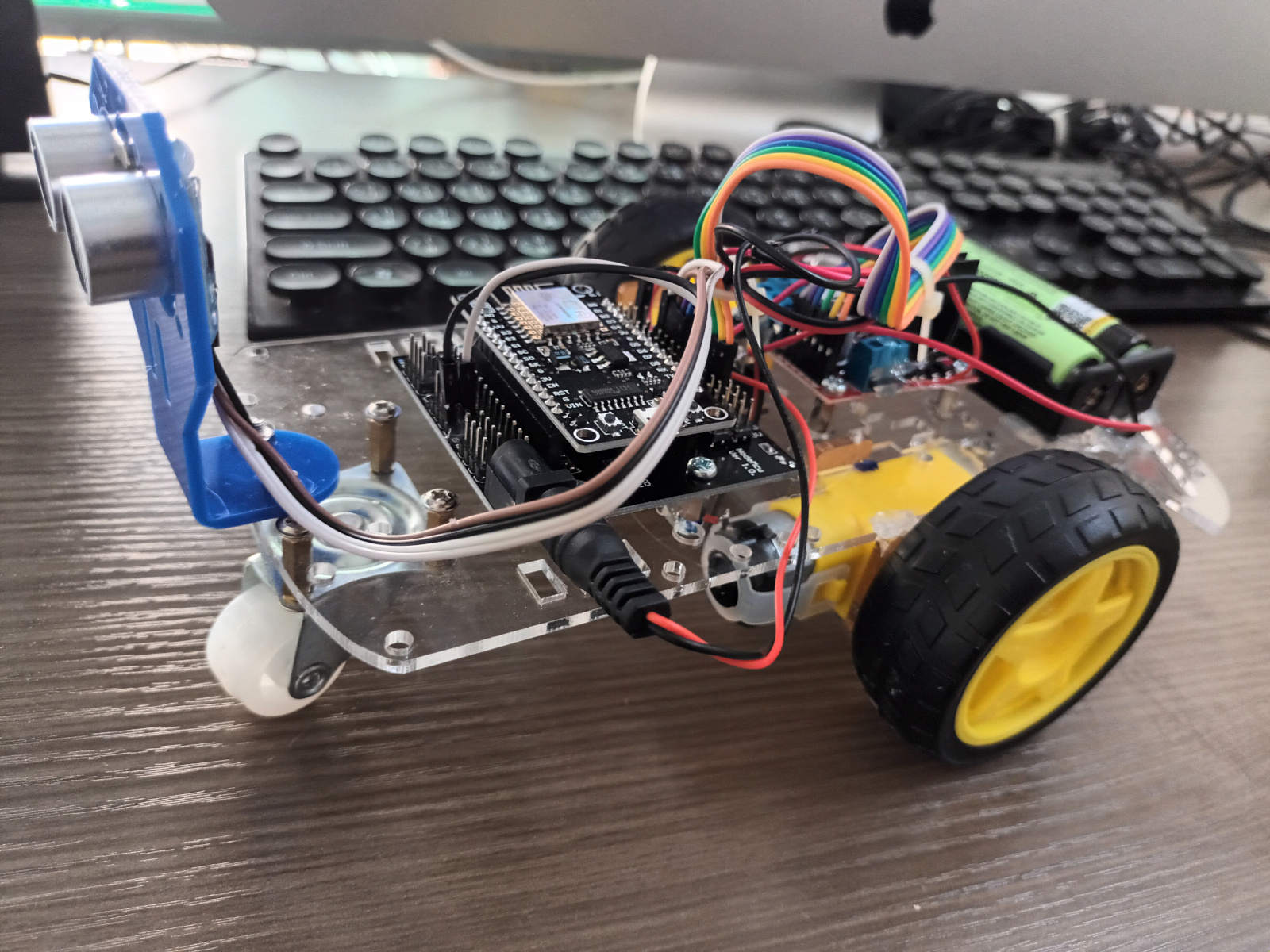
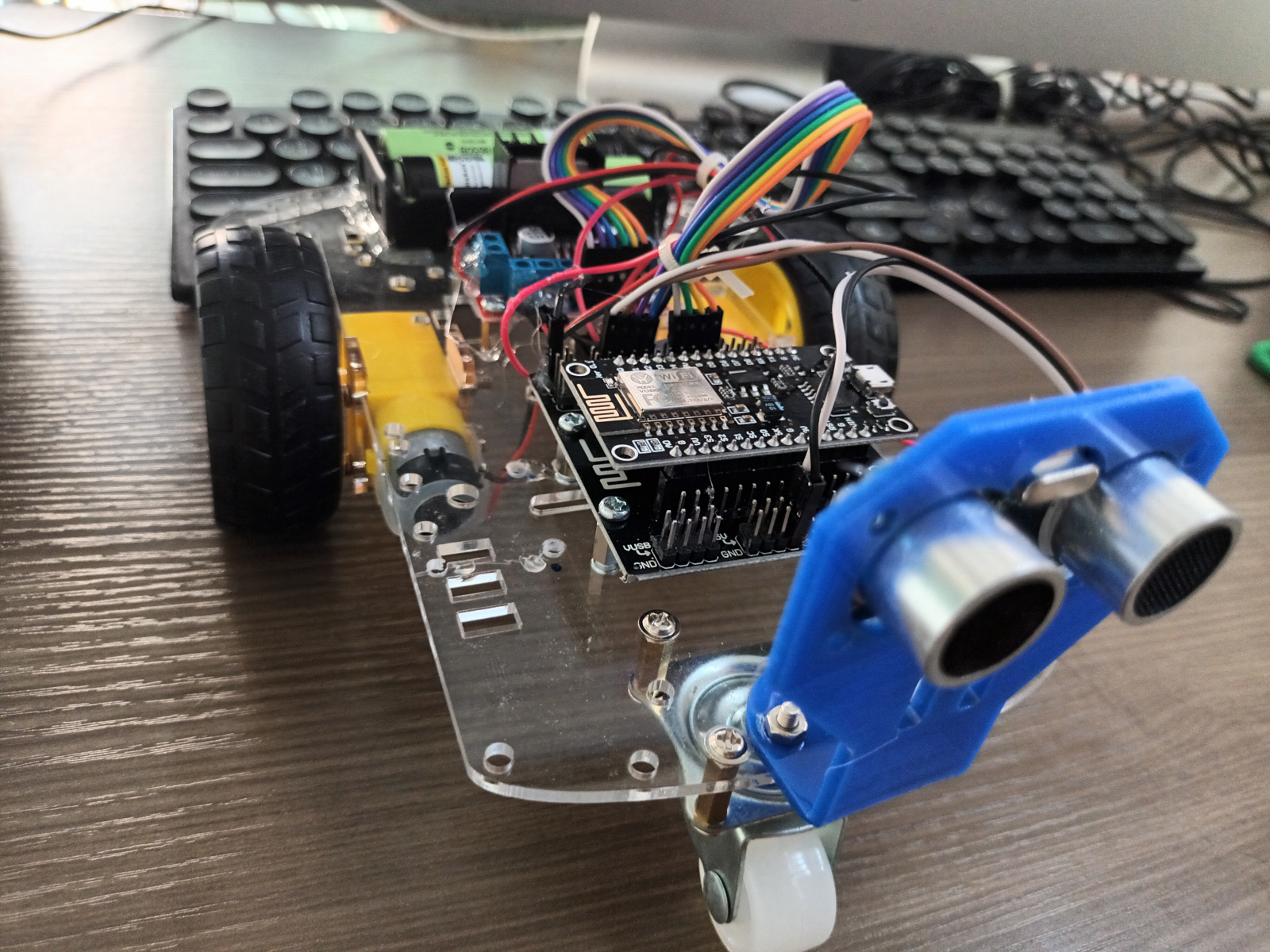
2. RB-0108 NodeMCU V3 CH340G Lua WIFI ESP8266 ESP-12E
3. RB-0109 NodeMcu Breadboard for NodeMCU V3
4. RB-0106 Micro USB Cable Wire 1m for NodeMCU
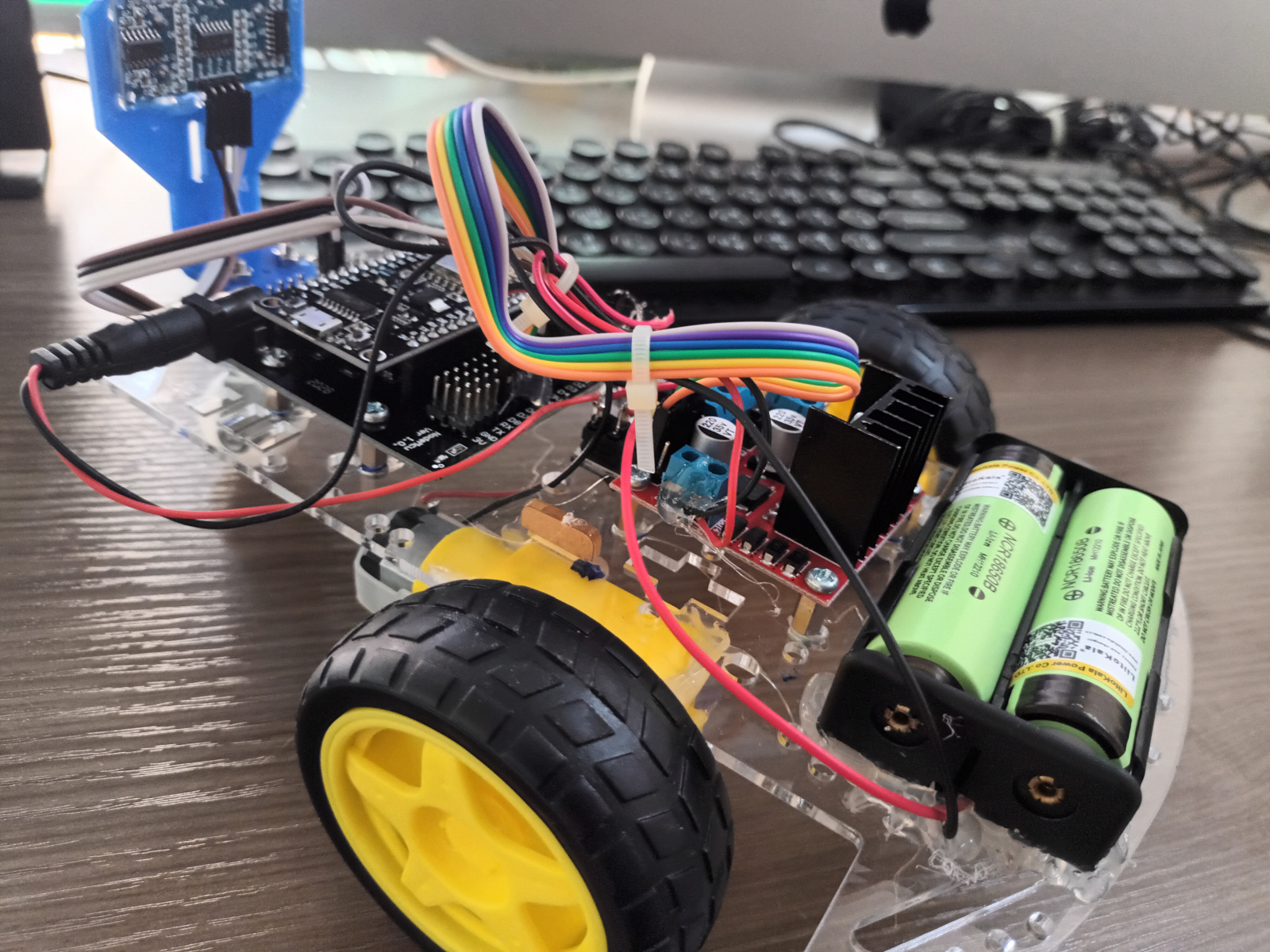
5. RB-0003 Motor Driver Module L298N
6. RB-0016 Jumper (F2M) cable wire 20cm Female to Male
7. RB-0017 Jumper (F2F) cable wire 20cm Female to Female
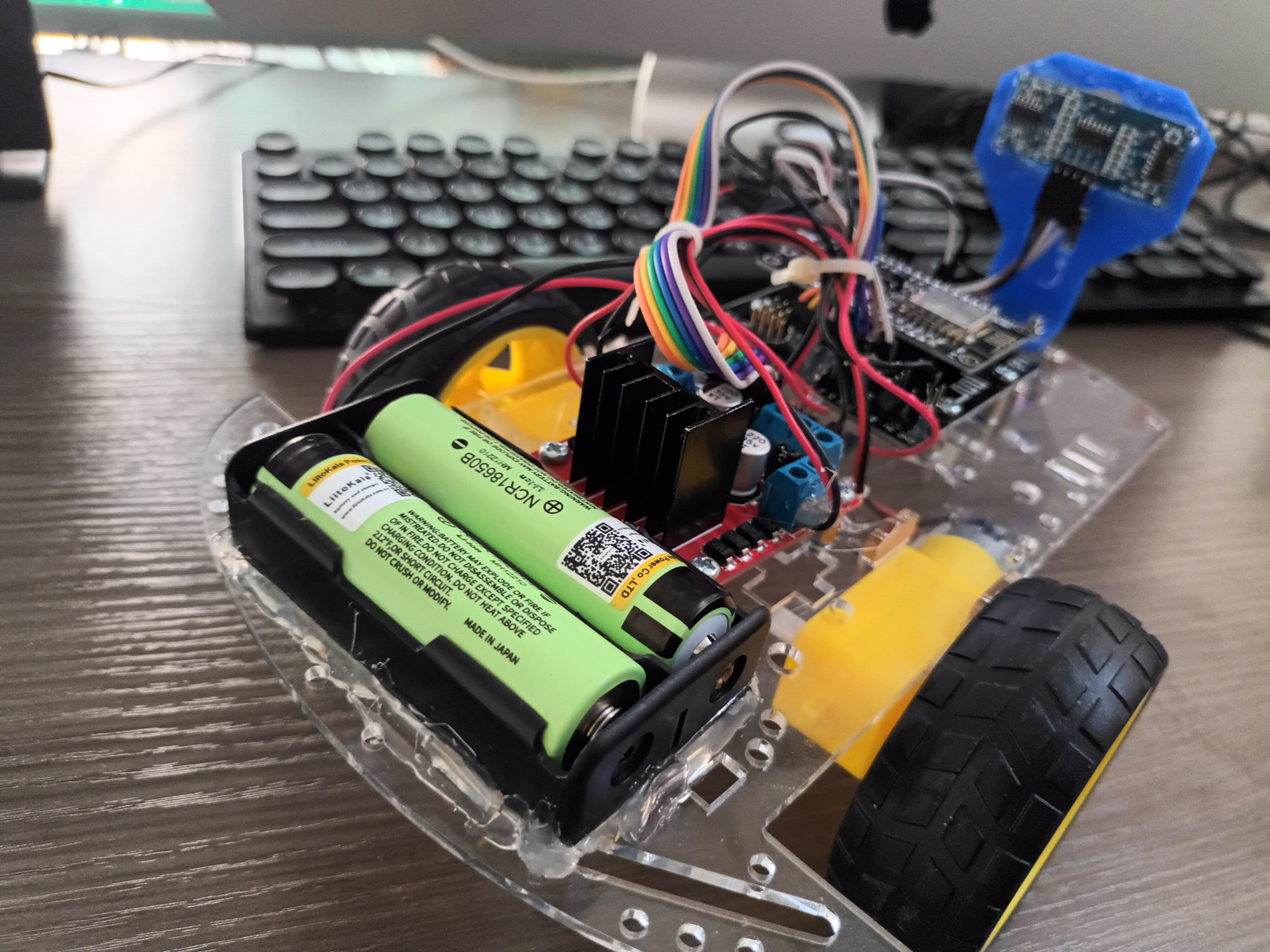
8. RB-0019 รางถ่าน 18650 – 2 ก้อน
9. RB-0021 ถ่านชาร์จ 18650 NCR18650B 3.7v 3400mAh 2 ก้อน
10. RB-0049 แจ๊กขั้วถ่าน 9 โวลต์ สำหรับ Ardiuno
11. RB-0025 4เสารองแผ่นพีซีบีโลหะแบบเหลี่ยม 8 mm
12. RB-0006 Ultrasonic Sensor HC-SR04
13. RB-0007 Mounting Bracket for HC-SR04 แบบยาว
14. RB-0026 สกรูหัวกลม+น็อตตัวเมีย ขนาด 3มม ยาว 12มม
ขั้นตอนการทําโปรเจค
สรุป
การสร้างหุ่นยนต์ ESP8266 ที่สามารถหลบสิ่งกีดขวางด้วย Arduino IDE มีข้อดีมากมายที่น่าสนใจ:
- ความสะดวกในการใช้งาน: Arduino IDE เป็นเครื่องมือที่ใช้งานง่ายและมีชุดคำสั่งที่เข้าใจง่าย ทำให้ผู้ใช้ทุกคน ไม่ว่าจะเป็นมือใหม่หรือมือเชี่ยวชาญ สามารถเขียนโปรแกรมได้โดยง่าย
- เพิ่มความเฉลียวฉลาดให้กับหุ่นยนต์: การใช้ ESP8266 เป็นส่วนหนึ่งของหุ่นยนต์ให้ความสามารถในการรับรู้และตอบสนองต่อสิ่งกีดขวาง เช่น เซนเซอร์หรือการเชื่อมต่อกับระบบเซิร์ฟเวอร์
- เสถียรภาพและประสิทธิภาพ: ESP8266 เป็นโมดูลที่มีประสิทธิภาพสูงและมีเสถียรภาพในการทำงาน ทำให้หุ่นยนต์สามารถทำงานอย่างมีประสิทธิภาพและเสถียร
- การพัฒนาและปรับแต่งได้: ESP8266 มีความยืดหยุ่นในการพัฒนาและปรับแต่งโปรแกรมตามความต้องการของผู้ใช้ ทำให้สามารถปรับปรุงและพัฒนาความสามารถของหุ่นยนต์ได้อย่างไม่จำกัด
- การใช้งานและเรียนรู้: การสร้างหุ่นยนต์ ESP8266 ให้ความสามารถในการหลบสิ่งกีดขวางเป็นโอกาสที่ดีในการศึกษาและเรียนรู้เกี่ยวกับเทคโนโลยี IoT (Internet of Things) และการพัฒนาหุ่นยนต์ในยุคปัจจุบัน
วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
ระบบสมาชิก
เว็บเพื่อนบ้าน

 โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ



▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
จําหน่าย อุปกรณ์หุ่นยนต์ Arduino , ESP8266, ESP32 , STM32 , micro:bit , Paspberry Pi รับประกอบหุ่นยนต์ ชุดคิทหุ่นยนต์ ตัวอย่างโปรเจค IoT (Internet of Things) อินเทอร์เน็ตของสรรพสิ่ง
เบอร์โทร : 095-226-2116
อีเมล : robotsiam16@gmail.com
อีเมล : robotsiam16@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม