ชุดคิท หุ่นยนต์ Arduino ควบคุมด้วยเสียงปรบมือ



| รหัสสินค้า | KIT-0040 |
| หมวดหมู่ | ชุดหุ่นยนต์ Arduino |
| ราคาปกติ | |
| ลดเหลือ | 1,820.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |
หยิบลงตะกร้า

รายละเอียดสินค้า
การสร้างหุ่นยนต์ที่สามารถควบคุมด้วยเสียงปรบมือไม่ใช่เรื่องที่ยากต่อคนที่มีความรู้เกี่ยวกับการเขียนโปรแกรม Arduino และการใช้งานเซนเซอร์เสียง เราสามารถเริ่มต้นโดยการเตรียมพร้อมเซนเซอร์เสียง (sound sensor) และตัว Arduino พร้อมทั้งหุ่นยนต์ที่เราต้องการควบคุม
( สั่งซื้อจำนวนมากติดต่อโทร : 095-226-2116 หรือ LINE ID : kensiam2016 )
ตัวอย่างโปรเจคที่สามารถสร้างสรรค์ได้
(และยังสามารถ ต่อ-ยอด ดัดแปลงแก้ไข เพิ่มเติม เป็นโปรเจคอื่นๆ ได้ตามต้องการ)
ประโยชน์และการนำไปใช้
การควบคุมหุ่นยนต์ด้วยเสียงปรบมือสามารถมีประโยชน์ในหลากหลายสถานการณ์ เช่น
การศึกษา: นักเรียนและนักศึกษาสามารถเรียนรู้เกี่ยวกับการทำงานของเซนเซอร์เสียงและการโปรแกรม Arduino ผ่านโครงการสร้างหุ่นยนต์ที่น่าสนใจนี้
การสร้างโมเดล: นักพัฒนาและผู้สนใจด้านเทคโนโลยีสามารถนำเสนอหุ่นยนต์ Arduino ควบคุมด้วยเสียงปรบมือเป็นโมเดลใหม่ในการแสดงงานหรืองานนิทรรศการ
การประยุกต์ใช้ในอุตสาหกรรม: การควบคุมเครื่องจักรหรืออุปกรณ์ต่าง ๆ ในอุตสาหกรรมด้วยเสียงปรบมืออาจช่วยลดความเสี่ยงในการประสานงานและเพิ่มความสะดวกสบายมากยิ่งขึ้น
หลักการทำงาน
- การรับสัญญาณเสียง: เซนเซอร์เสียงที่ติดตั้งบนหุ่นยนต์ Arduino จะรับสัญญาณเสียงจากสิ่งแวดล้อม โดยจะตรวจจับรูปแบบและลักษณะของเสียงที่มีอยู่ในบริเวณใกล้เคียง
- การประมวลผลสัญญาณเสียง: หลังจากที่เซนเซอร์เสียงได้รับสัญญาณ เสียงจะถูกส่งไปยัง Arduino เพื่อประมวลผล ซึ่งอาจเป็นการตรวจจับความดังของเสียงหรือรูปแบบของเสียง เพื่อแยกแยะว่าเสียงนั้นเป็นเสียงปรบมือหรือไม่
- การตรวจจับรูปแบบเสียงปรบมือ: เมื่อ Arduino ตรวจจับเสียงปรบมือ โปรแกรมจะทำการวิเคราะห์รูปแบบของเสียงเพื่อระบุคำสั่งที่ต้องการ ซึ่งอาจเป็นการเคลื่อนที่หรือการกระทำอื่น ๆ ตามที่ได้รับการกำหนดไว้
- การควบคุมการทำงานของหุ่นยนต์: เมื่อรูปแบบของเสียงถูกตรวจจับและระบุแล้ว Arduino จะสั่งให้หุ่นยนต์ดำเนินการตามคำสั่งที่กำหนดไว้ ซึ่งอาจเป็นการเคลื่อนที่ไปข้างหน้าหรือกลับหลัง หรือการทำงานอื่น ๆ ตามที่ผู้ใช้กำหนด
- การปรับปรุงและวิเคราะห์ผลการทำงาน: หลังจากที่หุ่นยนต์ดำเนินการตามคำสั่ง เราสามารถทำการปรับปรุงและประเมินผลการทำงานของหุ่นยนต์เพื่อปรับปรุงประสิทธิภาพในการทำงานในอนาคต
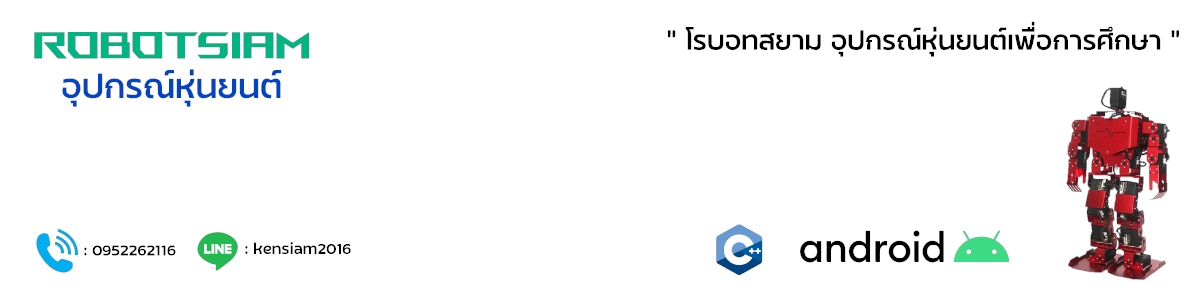
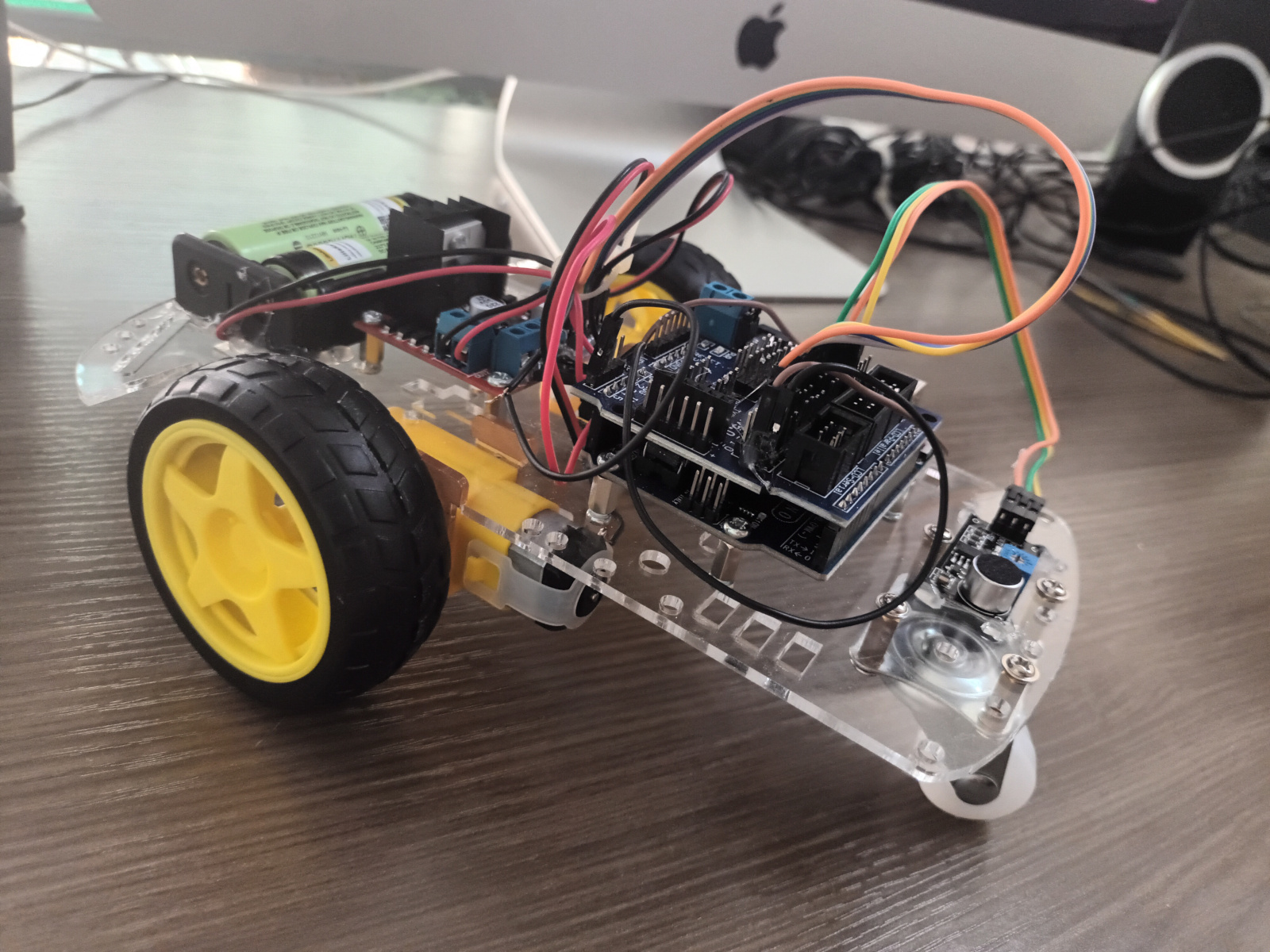
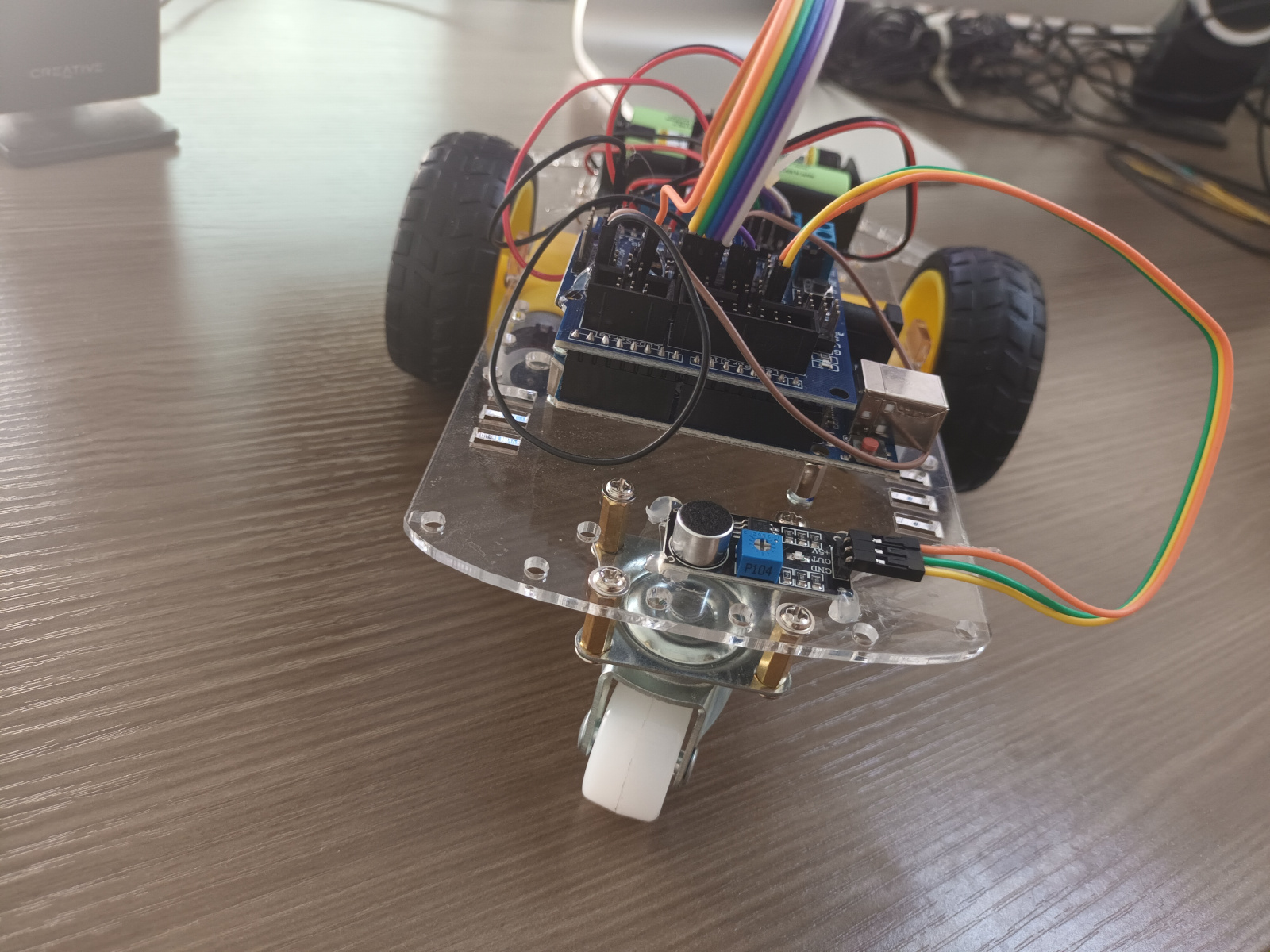
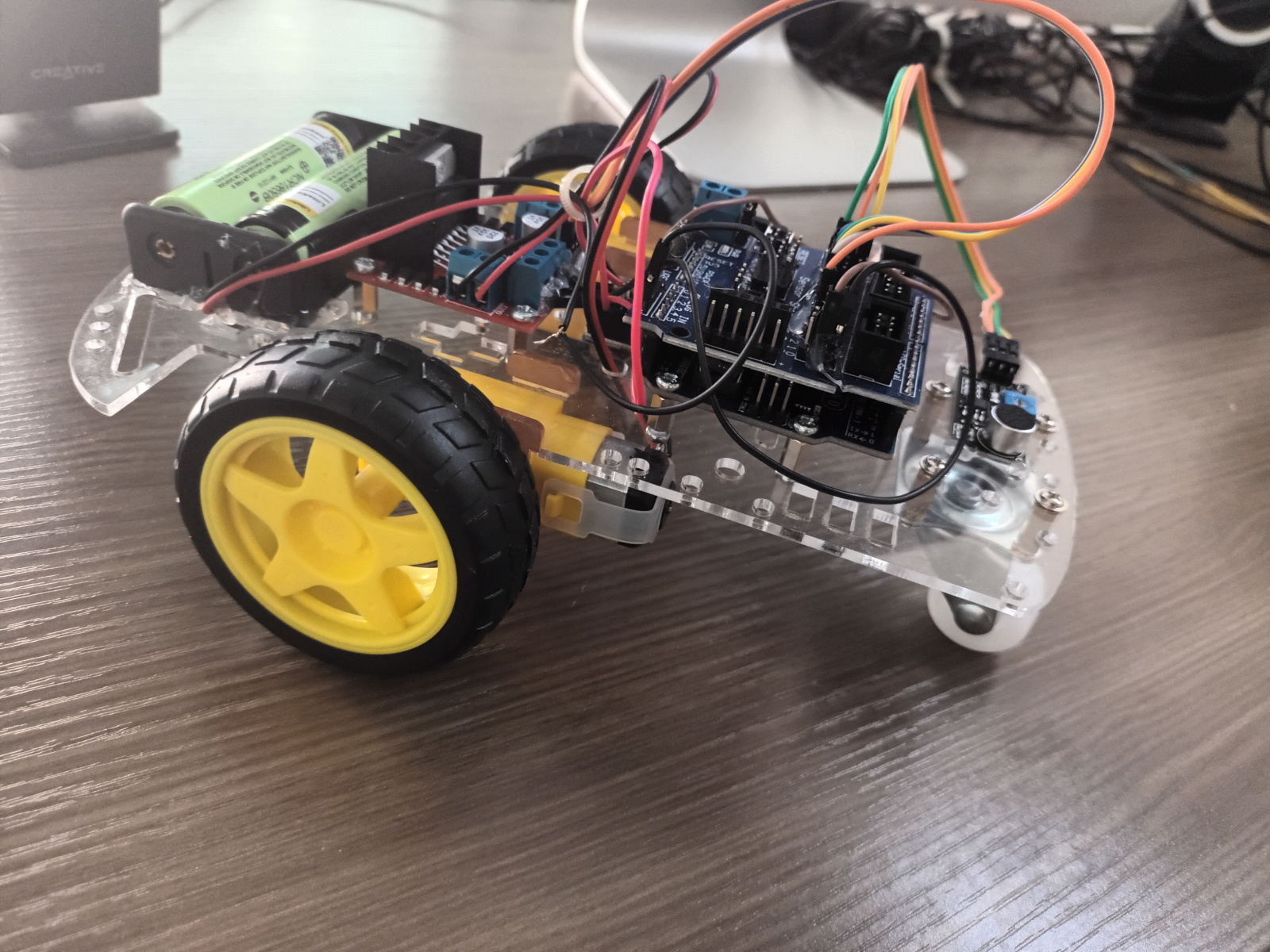
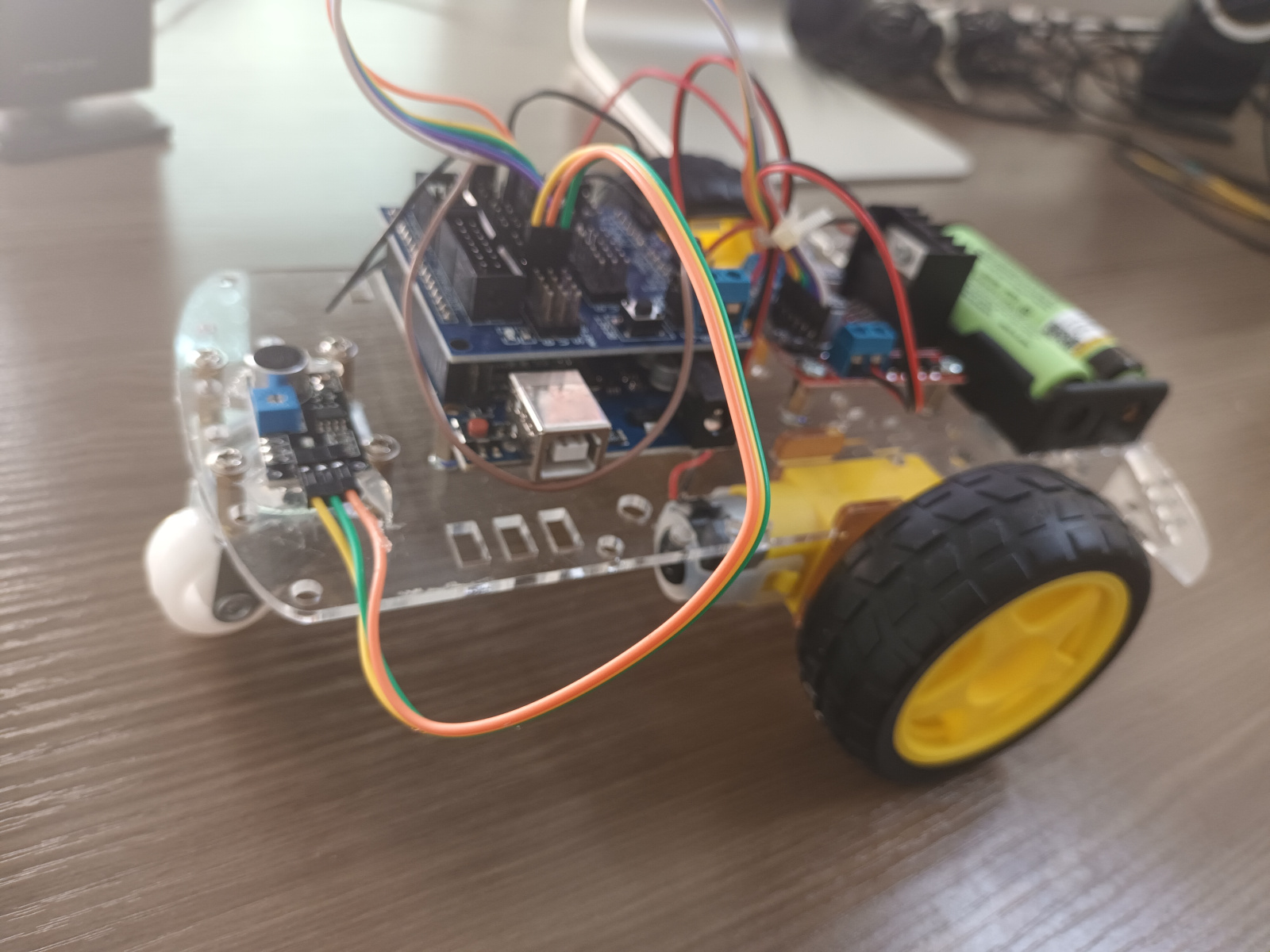
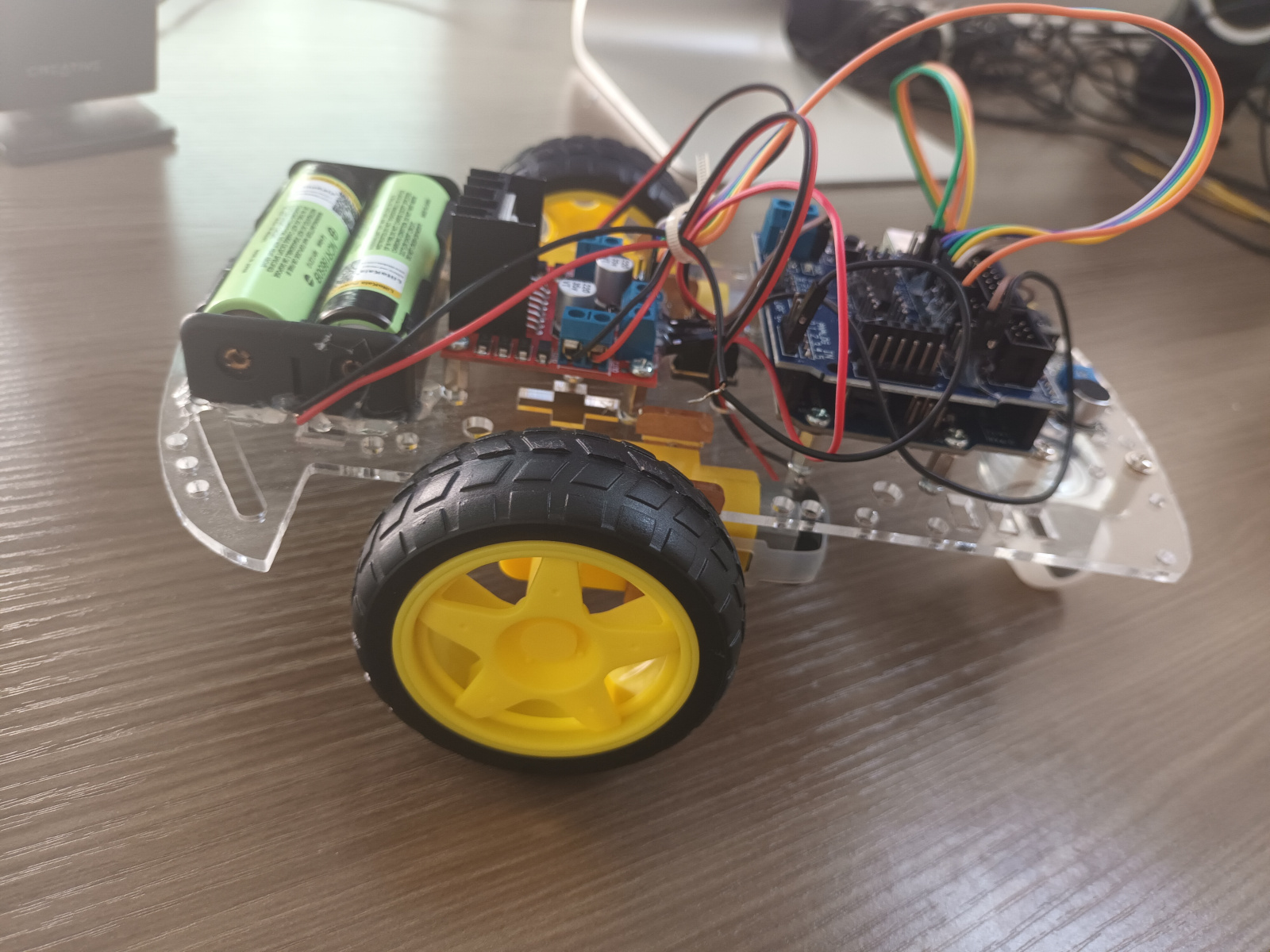
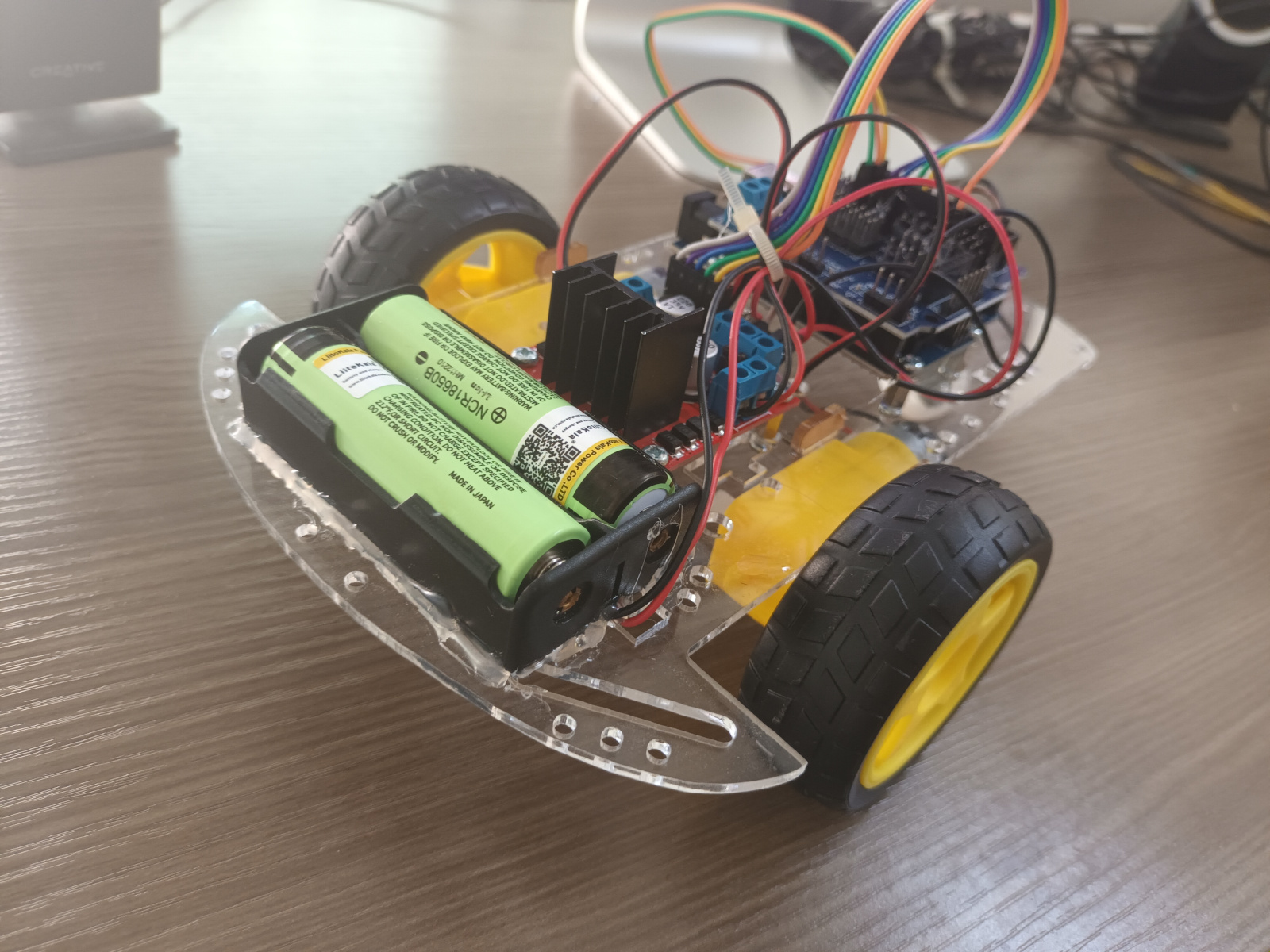
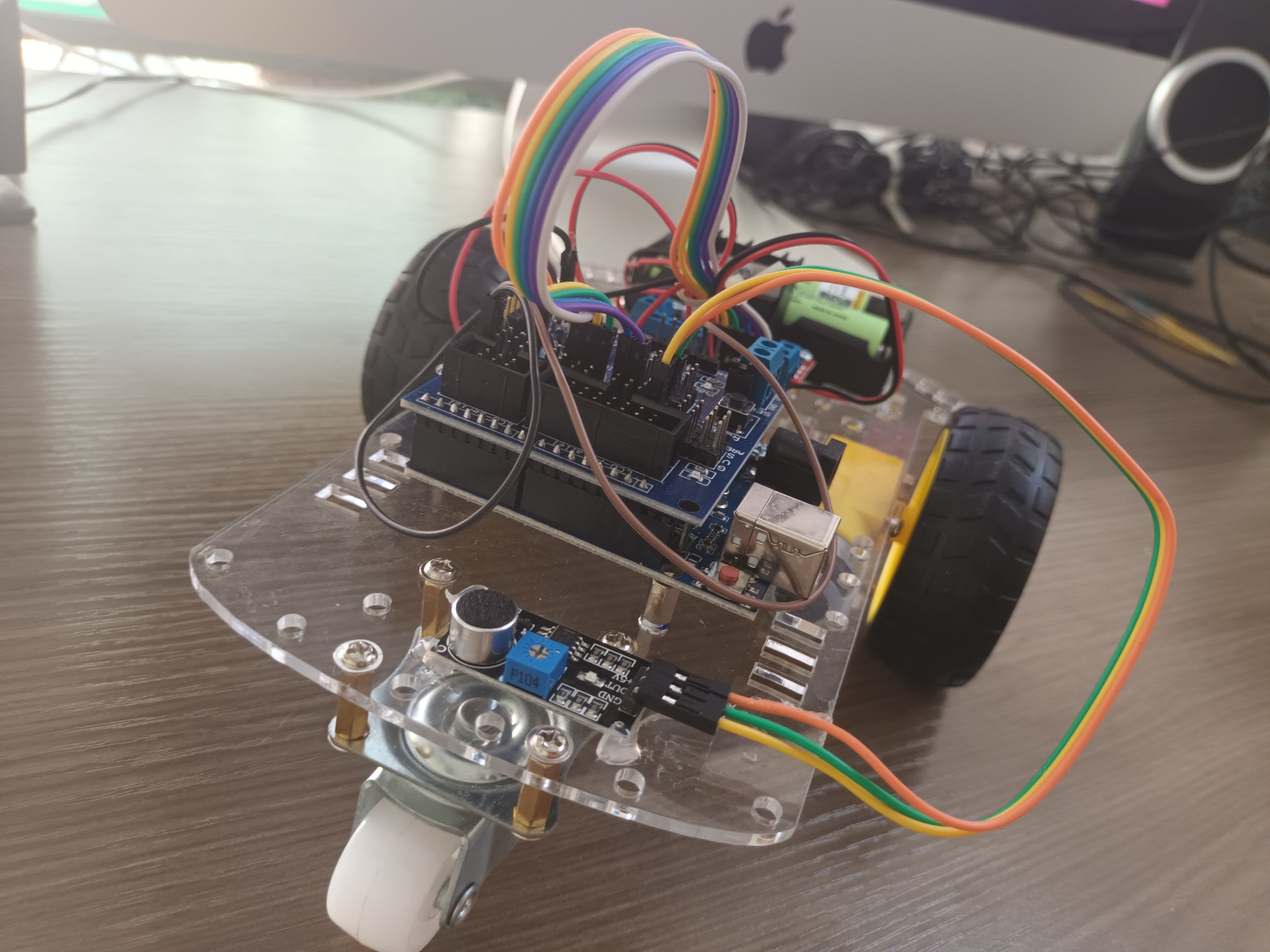
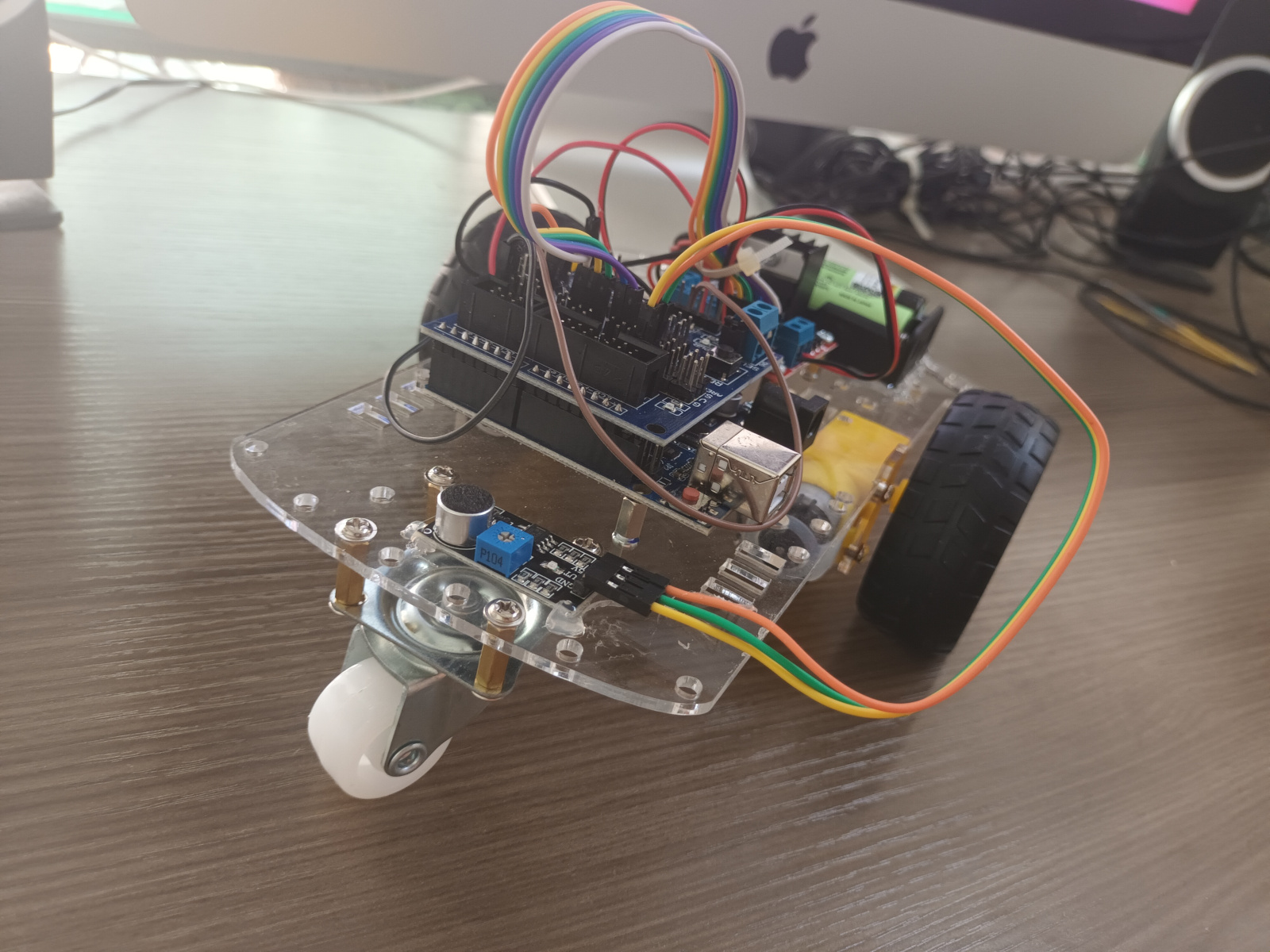
รายการอุปกรณ์
1. RB-0001 Arduino UNO R3
2. RB-0002 Sensor Shield V 5.0
3. RB-0003 Motor Driver Module L298N
4. RB-0015 Jumper (F2M) 20cm Female to Male
5. RB-0017 Jumper (F2F) 20cm Female to Female
6. RB-0019 รางถ่าน 18650 – 2 ก้อน
7. RB-0021 ถ่านชาร์จ 18650 NCR18650B 3.7v 3400mAh 2 ก้อน
8. RB-0023 2WD Smart Robot Car Chassis Kits
9. RB-0025 เสารองแผ่นพีซีบีโลหะแบบเหลี่ยม 8 mm
10. RB-0100 Sound Detection Sensor Module LM393
ขั้นตอนการทําโปรเจค
สรุป
การใช้หุ่นยนต์ Arduino ที่ควบคุมด้วยเสียงปรบมือมีข้อดีหลายประการดังนี้:
- ความสะดวกและเรียบง่าย: การควบคุมด้วยเสียงปรบมือเป็นวิธีที่สะดวกและเรียบง่ายในการสื่อสารกับหุ่นยนต์ ผู้ใช้สามารถควบคุมหุ่นยนต์ได้โดยไม่ต้องใช้อุปกรณ์เสริมหรือโทรศัพท์มือถือ
- การตอบสนองอย่างรวดเร็ว: หุ่นยนต์ที่ควบคุมด้วยเสียงปรบมือมักมีการตอบสนองที่รวดเร็วต่อคำสั่ง เนื่องจากเสียงปรบมือสามารถถูกตรวจจับและประมวลผลได้อย่างรวดเร็ว
- ลดความซับซ้อนในการใช้งาน: การใช้เสียงเป็นวิธีการควบคุมที่มีความเป็นธรรมชาติและเข้าใจง่าย ทำให้ลดความซับซ้อนในการใช้งานและลดเวลาในการฝึกฝนการใช้งานให้กับผู้ใช้
- ไม่ต้องใช้มือ: การควบคุมด้วยเสียงปรบมือไม่ต้องการการใช้มือในการควบคุม ซึ่งเป็นประโยชน์ในสถานการณ์ที่มือถือไม่สะดวกหรือถูกใช้งานไปแล้ว
- ประหยัดทรัพยากร: เนื่องจากใช้เซนเซอร์เสียงภายในหุ่นยนต์ Arduino การควบคุมด้วยเสียงปรบมือไม่ต้องการอุปกรณ์เสริมเพิ่มเติม ทำให้ประหยัดทรัพยากรและลดความซับซ้อนในการติดตั้งและใช้งาน
- ปรับแต่งได้: การใช้งานร่วมกับ Arduino ทำให้ผู้ใช้สามารถปรับแต่งและขยายความสามารถของหุ่นยนต์ได้ตามต้องการ เช่น เพิ่มฟังก์ชันการทำงานเพิ่มเติมหรือการตอบสนองต่อเสียงที่หลากหลายมากยิ่งขึ้น
การควบคุมหุ่นยนต์ Arduino ด้วยเสียงปรบมือเป็นเทคโนโลยีที่ทันสมัยและมีความสามารถที่น่าทึ่ง ไม่เพียงแต่เสริมความสะดวกในการใช้งานแต่ยังเปิดโอกาสให้เกิดนวัตกรรมใหม่ๆ ในการใช้งานหุ่นยนต์ในสถานการณ์ที่หลากหลายมากยิ่งขึ้น
วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
ระบบสมาชิก
เว็บเพื่อนบ้าน

 โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ



▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
จําหน่าย อุปกรณ์หุ่นยนต์ Arduino , ESP8266, ESP32 , STM32 , micro:bit , Paspberry Pi รับประกอบหุ่นยนต์ ชุดคิทหุ่นยนต์ ตัวอย่างโปรเจค IoT (Internet of Things) อินเทอร์เน็ตของสรรพสิ่ง
เบอร์โทร : 095-226-2116
อีเมล : robotsiam16@gmail.com
อีเมล : robotsiam16@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม