โปรเจค หุ่นยนต์อ่านตัวเลข TensorFlow + Keras
6 ปีที่ผ่านมา

โปรเจคหุ่นยนต์อ่านตัวเลข TensorFlow + Keras โปรเจคนี้จะใช้ การสร้างโครงข่ายประสาทเทียม CNN ด้วย Keras ในการอ่านค่าตัวเลขในกระดาษ และแยกแยะตัวเลขว่าเป็นเลขอะไร เมื่ออ่านค่าได้แล้ว จึงไปสั่งควบคุมหุ่นยนต์ โดย 2 ให้เดินหน้า , 3 ให้ถอยหลัง , 4 ให้เลี้ยวซ้าย , 5 ให้เลี้ยวขวา และ 8 ให้หยุด
อุปกรณ์ที่ใช้
11. สกรูหัวกลม+น็อตตัวเมีย ขนาด 2.6 มม. ยาว 10 มม
12. Power Bank 20000 mAh USB Output DC 5V/2.1A
13. Camera V2 Module 8MP
14. พลาสติกเจาะรูแนวตั้ง รูปตัว L ขนาด 10 x 20 mm
อุปกรณ์ที่ใช้
8. เพาเวอร์สวิตซ์สำหรับเปิดปิด
9. รางถ่าน 18650 3 ก้อน
10 . ถ่านชาร์จ 18650 Panasonic NCR18650B 3.7v 3400mAh จำนวน 3 ก้อน
9. รางถ่าน 18650 3 ก้อน
10 . ถ่านชาร์จ 18650 Panasonic NCR18650B 3.7v 3400mAh จำนวน 3 ก้อน
11. สกรูหัวกลม+น็อตตัวเมีย ขนาด 2.6 มม. ยาว 10 มม
12. Power Bank 20000 mAh USB Output DC 5V/2.1A
13. Camera V2 Module 8MP
14. พลาสติกเจาะรูแนวตั้ง รูปตัว L ขนาด 10 x 20 mm
ขั้นตอนการทำงาน
1. การติดตั้ง Linux ให้กับ Raspberry โดยใช้ไฟล์ image
2. การใช้งาน GPIO ใน Raspberry Pi ด้วย Python
3. การประกอบหุ่นยนต์ Raspberry Pi
4. วิธีเปิดใช้งาน Remote Desktop ไปยัง Raspberry Pi
5. ทดสอบการเคลื่อนที่ของหุ่นยนต์ Raspberry Pi
6. การติดตั้งและการใช้งาน Camera V2 Module
7. การติดตั้ง TensorFlow และ Keras
8. TensorFlow กับรูปภาพตัวเลข MNIST Data เบื้องต้น
9. การสร้างโครงข่ายประสาทเทียม CNN ด้วย Keras
10. โปรเจคหุ่นยนต์อ่านตัวเลข TensorFlow + Keras
10.1 สร้างไฟล์ build_model.py
เป็นการสร้างโครงข่ายประสาทเทียมขนาดใหญ่สำหรับ MNIST
โดยมีขั้นตอนดังนี้เปิดโปรแกรม เทอมินอล (Root Terminal)
สร้างโฟลเดอร์ number_robot โดยใช้คำสั่ง
mkdir number_robot
เปิดโปรแกรม Python 3 (IDLE) เขียนโค้ดดังนี้
# Larger CNN for the MNIST Dataset
import numpy
from keras.datasets import mnist
from keras.models import Sequential
from keras.layers import Dense
from keras.layers import Dropout
from keras.layers import Flatten
from keras.layers.convolutional import Conv2D
from keras.layers.convolutional import MaxPooling2D
from keras.utils import np_utils
from keras import backend as K
K.set_image_dim_ordering('th')
# fix random seed for reproducibility
seed = 7
numpy.random.seed(seed)
# load data
(X_train, y_train), (X_test, y_test) = mnist.load_data()
# reshape to be [samples][pixels][width][height]
X_train = X_train.reshape(X_train.shape[0], 1, 28, 28).astype('float32')
X_test = X_test.reshape(X_test.shape[0], 1, 28, 28).astype('float32')
# normalize inputs from 0-255 to 0-1
X_train = X_train / 255
X_test = X_test / 255
# one hot encode outputs
y_train = np_utils.to_categorical(y_train)
y_test = np_utils.to_categorical(y_test)
num_classes = y_test.shape[1]
# define the larger model
def larger_model():
# create model
model = Sequential()
model.add(Conv2D(30, (5, 5), input_shape=(1, 28, 28), activation='relu'))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Conv2D(15, (3, 3), activation='relu'))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Dropout(0.2))
model.add(Flatten())
model.add(Dense(128, activation='relu'))
model.add(Dense(50, activation='relu'))
model.add(Dense(num_classes, activation='softmax'))
# Compile model
model.compile(loss='categorical_crossentropy', optimizer='adam', metrics=['accuracy'])
return model
# build the model
model = larger_model()
# Fit the model
model.fit(X_train, y_train, validation_data=(X_test, y_test), epochs=20, batch_size=200)
# Save entire model to a HDF5 file
model.save('my_model.h5')
print ("Finished")
หรือดาวน์โหลดโค้ดจากลิงค์ด้านล่าง
https://drive.google.com/open?id=1h1I8IXJAN64-OihiThKmMXjah5THVcMa
Save ไปที่ โฟลเดอร์ number_robot และตั้งชื่อเป็น build_model.py

ทดสอบการทำงาน Run Module

ตัวอย่างเช่นความแม่นยำในการฝึกอบรมและการทดสอบการตรวจสอบจะถูกพิมพ์ในแต่ละรอบและเมื่อสิ้นสุด เพื่อความแม่นยำ จึงใช้ epochs 20 รอบ จึงใช้เวลานานประมาณ 6-7 ชั่วโมง ในการทำงานและรอจนขึ้นคำว่า Finished

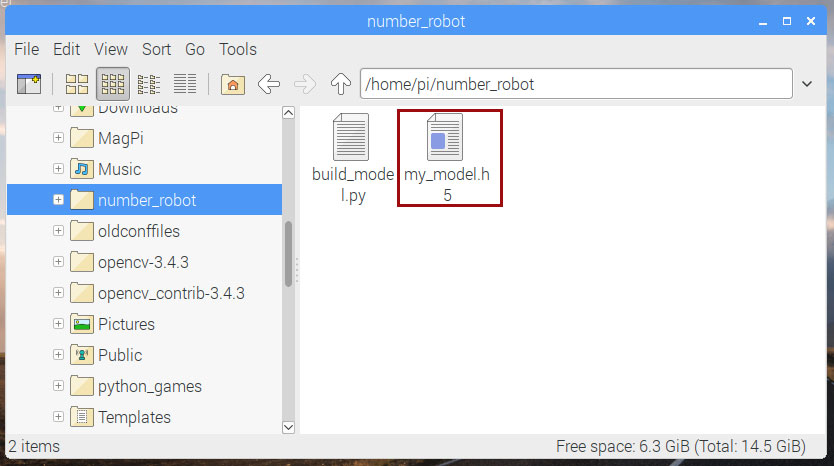
ไฟล์ HDF5 คือ
HDF เป็นไฟล์รูปแบบข้อมูลลำดับชั้นไฟล์โดยที่พวกเขาเป็นรูปแบบแฟ้มมาตรฐานสำหรับการจัดเก็บข้อมูลทางวิทยาศาสตร์ ไฟล์เหล่านี้มีการแบ่งประเภท ส่วนใหญ่ที่ใช้ในการทดสอบ การใช้งานการบินและอวกาศวิทยาศาสตร์สิ่งแวดล้อม ไฟล์ HDF สามารถจัดการมองวิเคราะห์มองเห็นเช่นเดียวกับการแปลงเป็นข้อมูลทางวิทยาศาสตร์ที่มีความสัมพันธ์ระหว่างข้อมูลที่ซับซ้อนและยังมีรูปแบบที่มีความยืดหยุ่นมาก
10.2 แก้ไขไฟล์ /etc/default/motion
ถ้าเคยทำ "การติดตั้ง Motion และ ดูภาพกล้องผ่านทางหน้าเว็บเพจ" มาก่อน เพราะจะมีการแก้ค่าจาก no เป็น yes เอาไว้ (ถ้าไม่เคยทำก็ไม่ต้องแก้ไข) โดยแก้ไขให้กลับมาเป็น start_motion_daemon=no เหมือนเดิม
เปิดไฟล์ /etc/default/motion มาแก้ไข โดยใช้คำสั่ง
sudo nano /etc/default/motion

ค่าเดิม start_motion_daemon=yes แก้เป็น start_motion_daemon=no
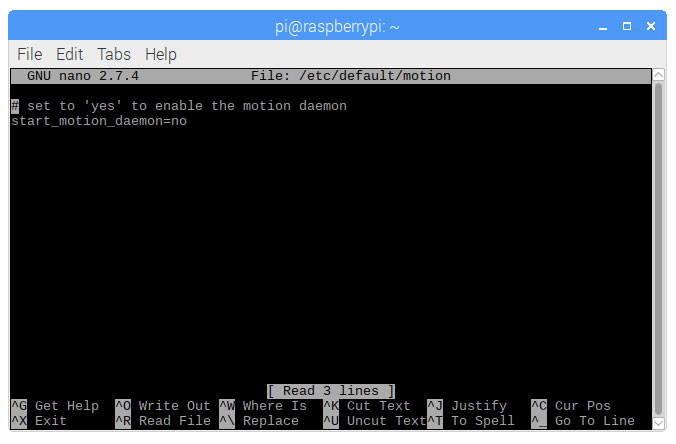
จากนั้นบันทึก Ctrl + O แล้วตามด้วย Enter เพื่อบันทึกข้อมูลใหม่ แล้ว กด Ctrl + X เพื่อออกจากโปรแกรม
-เมื่อทำการอัพเดตเรียบร้อยต้องทำการรีบูทเครื่องใหม่
sudo reboot
10.3 ทดสอบการอ่านค่าตัวเลขของหุ่นยนต์
เสียบสาย USB ของ Power Bank ต่อเข้ากับ 5V Micro USB ของบอร์ด Raspberry Pi
ให้ภาพตัวเลขอยูห่างจากหุ่นยนต์ประมาณ 12 -13 เซนติเมตร
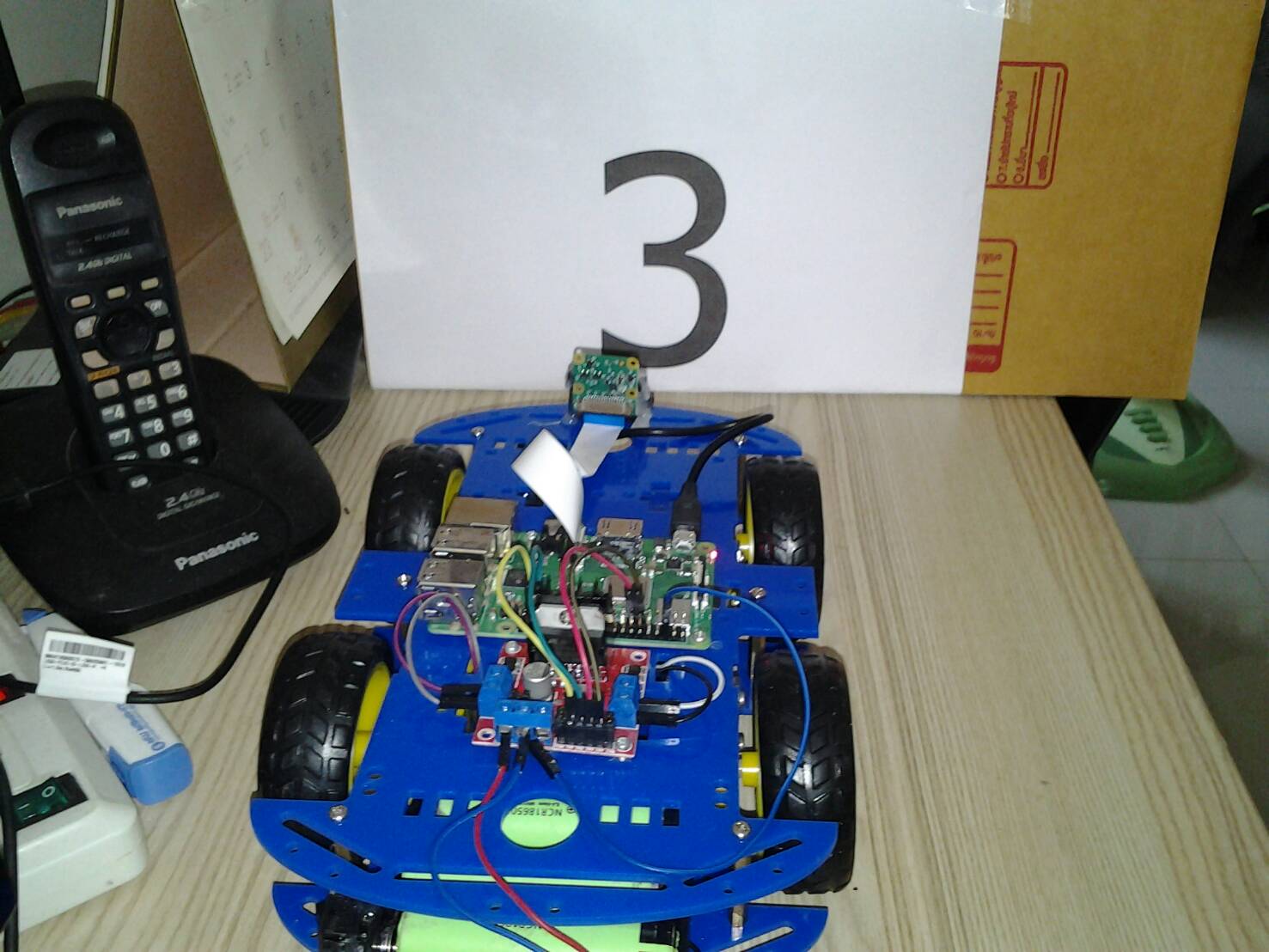
ความสูงของตัวเลขห่างจากพื้นประมาณ 1.5 -2 เซนติเมตร

สร้างไฟล์ test_model.py เพื่อทดสอบการอ่านค่าตัวเลขของหุ่นยนต์
เปิดโปรแกรม Python 3 (IDLE) เขียนโค้ดดังนี้
from time import sleep
from picamera import PiCamera
camera = PiCamera()
camera.resolution = (800, 800)
camera.start_preview()
sleep(2)
camera.capture('/home/pi/number_robot/image.jpg')
from skimage.io import imread
import numpy as np
im = imread("image.jpg")
from skimage.transform import resize
# resize to 28 x 28
im_resize = resize(im,(28,28), mode='constant')
from skimage.color import rgb2gray
# turn the image from color to gray
im_gray = rgb2gray(im_resize)
# the color of the original set are inverted,so we invert it here
im_gray_invert = 255 - im_gray*255
#treat color under threshold as black
im_gray_invert[im_gray_invert<=90] = 0
from keras.models import load_model
model=load_model('my_model.h5')
im_final = im_gray_invert.reshape(1,1,28,28)
# the below output is a array of possibility of respective digit
ans = model.predict(im_final)
print(ans)
ans = ans[0].tolist().index(max(ans[0].tolist()))
print("the predicted digit is",ans)
หรือดาวน์โหลดโค้ดจากลิงค์ด้านล่าง
Save ไปที่ โฟลเดอร์ number_robot และตั้งชื่อเป็น test_model.py


เริ่มที่ภาพตัวเลข 2 -> Run Module , ภาพตัวเลข 3 -> Run Module , ภาพตัวเลข 4 -> Run Module , ภาพตัวเลข 5 -> Run Module
จะแสดงค่าตัวเลขที่อ่านได้ ถ้าอ่านได้ตามภาพที่ให้ถ่าย แสดงว่า หุ่นยนต์สามารถอ่านค่าได้ถูกต้องแล้ว รอทำในขั้นตอนต่อไป

เมื่อเข้าไปตรวจสอบที่ File Manager ในโฟลเดอร์ number_robot จะพบไฟล์ image.jpg เพิ่มเข้ามา
สามารถดูภาพที่ถ่าย โดยให้คลิกขวาที่ไฟล์ image.jpg เลือก Chromium Web Browser

จะแสดงภาพที่หุ่นยนต์ถ่ายไว้

10.4 ทดสอบการทำงาน
สร้างไฟล์ robot_number.py โดย
เปิดโปรแกรม Python 3 (IDLE) เขียนโค้ดดังนี้
import RPi.GPIO as GPIO
#set GPIO numbering mode and define output pins
GPIO.setmode(GPIO.BOARD)
GPIO.setup(11,GPIO.OUT)
GPIO.setup(13,GPIO.OUT)
GPIO.setup(35,GPIO.OUT)
GPIO.setup(37,GPIO.OUT)
from time import sleep
from picamera import PiCamera
camera = PiCamera()
camera.resolution = (800, 800)
camera.start_preview()
sleep(2)
camera.capture('/home/pi/number_robot/image.jpg')
from skimage.io import imread
import numpy as np
im = imread("image.jpg")
from skimage.transform import resize
# resize to 28 x 28
im_resize = resize(im,(28,28), mode='constant')
from skimage.color import rgb2gray
# turn the image from color to gray
im_gray = rgb2gray(im_resize)
# the color of the original set are inverted,so we invert it here
im_gray_invert = 255 - im_gray*255
#treat color under threshold as black
im_gray_invert[im_gray_invert<=90] = 0
from keras.models import load_model
model=load_model('my_model.h5')
im_final = im_gray_invert.reshape(1,1,28,28)
# the below output is a array of possibility of respective digit
ans = model.predict(im_final)
print(ans)
ans = ans[0].tolist().index(max(ans[0].tolist()))
print("the predicted digit is",ans)
if ans == 8:
GPIO.output(11,False)
GPIO.output(13,False)
GPIO.output(35,False)
GPIO.output(37,False)
elif ans == 2:
GPIO.output(11,True)
GPIO.output(13,False)
GPIO.output(35,True)
GPIO.output(37,False)
sleep(0.3)
GPIO.output(11,False)
GPIO.output(13,False)
GPIO.output(35,False)
GPIO.output(37,False)
elif ans == 3:
GPIO.output(11,False)
GPIO.output(13,True)
GPIO.output(35,False)
GPIO.output(37,True)
sleep(0.4)
GPIO.output(11,False)
GPIO.output(13,False)
GPIO.output(35,False)
GPIO.output(37,False)
elif ans == 4:
GPIO.output(11,True)
GPIO.output(13,False)
GPIO.output(35,False)
GPIO.output(37,False)
sleep(0.4)
GPIO.output(11,False)
GPIO.output(13,False)
GPIO.output(35,False)
GPIO.output(37,False)
elif ans == 5:
GPIO.output(11,False)
GPIO.output(13,False)
GPIO.output(35,True)
GPIO.output(37,False)
sleep(0.4)
GPIO.output(11,False)
GPIO.output(13,False)
GPIO.output(35,False)
GPIO.output(37,False)
else:
GPIO.output(11,False)
GPIO.output(13,False)
GPIO.output(35,False)
GPIO.output(37,False)
GPIO.cleanup()
หรือดาวน์โหลดโค้ดจากลิงค์ด้านล่าง
https://drive.google.com/open?id=1IgsAd5Utat5Nhptxw4qU2C67Hg9I0r4s
Save ไปที่ โฟลเดอร์ number_robot และตั้งชื่อเป็น robot_number.py
เสียบสาย USB ของ Power Bank ต่อเข้ากับ 5V Micro USB ของบอร์ด Raspberry Pi
เปิด เพาเวอร์สวิตซ์ จะมีไฟสีแดงติดที่ Motor Driver
ให้ภาพตัวเลขอยูห่างจากหุ่นยนต์ประมาณ 12 -13 เซนติเมตร
ความสูงของตัวเลขห่างจากพื้นประมาณ 1.5 -2 เซนติเมตร
ทดสอบการทำงาน Run Module
เริ่มที่ภาพตัวเลข 2 -> Run Module , ภาพตัวเลข 3 -> Run Module , ภาพตัวเลข 4 -> Run Module , ภาพตัวเลข 5 -> Run Module
วีดีโอผลลัพธ์การทำงานของ โปรเจคหุ่นยนต์อ่านตัวเลข TensorFlow + Keras
.....

BLOG

โปรเจค Arduino 3 in 1 หรี่ไฟบ้าน 220V ด้วยแอปมือถือ / ด้วยขวดโค๊ก / ด้วยท่าทางมือ
1 ปีที่ผ่านมา
ชุดคิท Arduino 3 in 1 หรี่ไฟบ้าน 220V ด้วย แอปมือถือ / ขวดโค๊ก / ท่าทางมือ (Gestures) การเรียนรู้การสร้างระบบหรี่ไฟบ้าน 220V โดยใช้ Arduino มีข้อดีหลายประการ ดังนี้: พัฒนาทักษะด้านอิเล็กทรอนิกส์: การสร้างระบบนี้ช่วยให้คุณได้ฝึกทักษะการทำงานกับวงจรไฟฟ…
1 ปีที่ผ่านมา
ชุดคิท Arduino 3 in 1 หรี่ไฟบ้าน 220V ด้วย แอปมือถือ / ขวดโค๊ก / ท่าทางมือ (Gestures) การเรียนรู้การสร้างระบบหรี่ไฟบ้าน 220V โดยใช้ Arduino มีข้อดีหลายประการ ดังนี้: พัฒนาทักษะด้านอิเล็กทรอนิกส์: การสร้างระบบนี้ช่วยให้คุณได้ฝึกทักษะการทำงานกับวงจรไฟฟ…

โปรเจค ESP32 เปิด-ปิดไฟบ้าน 220V ผ่านอินเตอร์เน็ต ได้ทั่วโลก ด้วย Blynk 2.0
1 ปีที่ผ่านมา
ชุดคิท IoT ESP32 2 in 1 เปิดปิดไฟ ผ่าน อินเตอร์เน็ต ด้วย BLYNK / ESP Rainmaker Blynk คือ แพลตฟอร์ม IoT ที่ช่วยให้ผู้ใช้สามารถควบคุมและติดตามอุปกรณ์ผ่านอินเทอร์เน็ตได้ง่าย ๆ โดยไม่ต้องเขียนโค้ดซับซ้อน มีแอปพลิเคชันบนสมาร์ทโฟนที่สามารถออกแบบ UI เพื่อคว…
1 ปีที่ผ่านมา
ชุดคิท IoT ESP32 2 in 1 เปิดปิดไฟ ผ่าน อินเตอร์เน็ต ด้วย BLYNK / ESP Rainmaker Blynk คือ แพลตฟอร์ม IoT ที่ช่วยให้ผู้ใช้สามารถควบคุมและติดตามอุปกรณ์ผ่านอินเทอร์เน็ตได้ง่าย ๆ โดยไม่ต้องเขียนโค้ดซับซ้อน มีแอปพลิเคชันบนสมาร์ทโฟนที่สามารถออกแบบ UI เพื่อคว…

โปรเจค หุ่นยนต์ Arduino 4in1 - บังคับด้วยแอพ / ควบคุมด้วยเสียงปรบมือ / เดินตามเส้น / หลบสิ่งกีดขวาง
1 ปีที่ผ่านมา
ชุดคิท หุ่นยนต์ Arduino 4in1 - บังคับด้วยแอพ / ควบคุมด้วยเสียงปรบมือ / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ Arduino 4in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการ…
1 ปีที่ผ่านมา
ชุดคิท หุ่นยนต์ Arduino 4in1 - บังคับด้วยแอพ / ควบคุมด้วยเสียงปรบมือ / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ Arduino 4in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการ…

โปรเจค หุ่นยนต์ ESP8266 3in1 - บังคับผ่าน WIFI / เดินตามเส้น / หลบสิ่งกีดขวาง
1 ปีที่ผ่านมา
ชุดคิท หุ่นยนต์ ESP8266 3in1 - บังคับผ่าน WIFI / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ ESP8266 V3 3in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการเรียนรู้การสร้างหุ่…
1 ปีที่ผ่านมา
ชุดคิท หุ่นยนต์ ESP8266 3in1 - บังคับผ่าน WIFI / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ ESP8266 V3 3in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการเรียนรู้การสร้างหุ่…
โปรเจค หุ่นยนต์ ESP32 5 in 1 - บังคับผ่าน Bluetooth / บังคับผ่าน WIFI / บังคับผ่านอินเตอร์เน็ต / เดินตามเส้น / หลบสิ่งกีดขวาง
1 ปีที่ผ่านมา
ชุดคิท หุ่นยนต์ ESP32 5 in 1 - บังคับผ่าน Bluetooth / บังคับผ่าน WIFI / บังคับ ผ่านอินเตอร์เน็ต/ เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ ESP32 4in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรง…
1 ปีที่ผ่านมา
ชุดคิท หุ่นยนต์ ESP32 5 in 1 - บังคับผ่าน Bluetooth / บังคับผ่าน WIFI / บังคับ ผ่านอินเตอร์เน็ต/ เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ ESP32 4in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรง…
โปรเจค ESP32 เปิด-ปิดไฟ ผ่านอินเตอร์เน็ตด้วย ESP Rainmaker
1 ปีที่ผ่านมา
ESP RainMaker เป็นแพลตฟอร์มที่ช่วยให้นักพัฒนาสร้างอุปกรณ์ที่เชื่อมต่อกับ ESP32-S2 SoC ของ Espressif โดยไม่ต้องวุ่นวายกับการจัดการโครงสร้างพื้นฐาน มี SDK ของอุปกรณ์ แอปโทรศัพท์ที่ปรับเปลี่ยนได้เอง มิดเดิลแวร์คลาวด์แบบโปร่งใส และยูทิลิตีโฮสต์เพื่อลดควา…
1 ปีที่ผ่านมา
ESP RainMaker เป็นแพลตฟอร์มที่ช่วยให้นักพัฒนาสร้างอุปกรณ์ที่เชื่อมต่อกับ ESP32-S2 SoC ของ Espressif โดยไม่ต้องวุ่นวายกับการจัดการโครงสร้างพื้นฐาน มี SDK ของอุปกรณ์ แอปโทรศัพท์ที่ปรับเปลี่ยนได้เอง มิดเดิลแวร์คลาวด์แบบโปร่งใส และยูทิลิตีโฮสต์เพื่อลดควา…

โปรเจค Arduino เปิด-ปิดไฟ ด้วย โทรศัพท์ ผ่าน แอพบลูทูธ
1 ปีที่ผ่านมา
โปรเจค Arduino: เปิด-ปิดไฟด้วย โทรศัพท์ ผ่าน แอพบลูทูธ การควบคุมการเปิด-ปิดไฟในบ้านหรือสถานที่ต่าง ๆ ได้ง่ายขึ้นด้วยการใช้ Arduino ร่วมกับบลูทูธ. ในบทความนี้, เราจะสร้างโปรเจคที่ใช้ Arduino เพื่อควบคุมไฟผ่านแอพบลูทูธบนโทรศัพท์มือถือของเรา. การทำโปรเจ…
1 ปีที่ผ่านมา
โปรเจค Arduino: เปิด-ปิดไฟด้วย โทรศัพท์ ผ่าน แอพบลูทูธ การควบคุมการเปิด-ปิดไฟในบ้านหรือสถานที่ต่าง ๆ ได้ง่ายขึ้นด้วยการใช้ Arduino ร่วมกับบลูทูธ. ในบทความนี้, เราจะสร้างโปรเจคที่ใช้ Arduino เพื่อควบคุมไฟผ่านแอพบลูทูธบนโทรศัพท์มือถือของเรา. การทำโปรเจ…
โปรเจค Arduino ไฟฟ้าจากผลไม้ กับ หลอดไฟ 220 โวลต์
1 ปีที่ผ่านมา
สอนทำโปรเจค Arduino ไฟฟ้าจากผลไม้ กับ หลอดไฟ 220 โวลต์ "ทดลองไฟฟ้าจากผลไม้" เป็นการทดลองทางวิทยาศาสตร์ที่น่าสนใจเพื่อศึกษาและทดสอบกระบวนการผลิตไฟฟ้าโดยใช้มันฝรั่งในฐานะวัตถุดิบหลัก. การทดลองนี้มุ่งเน้นการเรียนรู้และทำความเข้าใจถึงพลังงานที่เกิดขึ้นจา…
1 ปีที่ผ่านมา
สอนทำโปรเจค Arduino ไฟฟ้าจากผลไม้ กับ หลอดไฟ 220 โวลต์ "ทดลองไฟฟ้าจากผลไม้" เป็นการทดลองทางวิทยาศาสตร์ที่น่าสนใจเพื่อศึกษาและทดสอบกระบวนการผลิตไฟฟ้าโดยใช้มันฝรั่งในฐานะวัตถุดิบหลัก. การทดลองนี้มุ่งเน้นการเรียนรู้และทำความเข้าใจถึงพลังงานที่เกิดขึ้นจา…
มินิโปรเจค Arduino วัดก๊าซคาร์บอนไดออกไซด์ แสดงผลที่จอ LCD
4 ปีที่ผ่านมา
ระดับคาร์บอนไดออกไซด์ปกติ (Normal CO2 Levels) ระดับคาร์บอนไดออกไซด์ปกติผลกระทบของ CO2 ต่อผู้ใหญ่ที่มีสุขภาพที่ดีสามารถสรุปได้ดังนี้-ระดับกลางแจ้งปกติ: 350 – 450 ppm-ระดับที่ยอมรับได้: <600 ppm=”” span=””>-ข้อร้องเร…
4 ปีที่ผ่านมา
ระดับคาร์บอนไดออกไซด์ปกติ (Normal CO2 Levels) ระดับคาร์บอนไดออกไซด์ปกติผลกระทบของ CO2 ต่อผู้ใหญ่ที่มีสุขภาพที่ดีสามารถสรุปได้ดังนี้-ระดับกลางแจ้งปกติ: 350 – 450 ppm-ระดับที่ยอมรับได้: <600 ppm=”” span=””>-ข้อร้องเร…
มินิโปรเจค Arduino เครื่องวัดฝุ่น PM2.5 ด้วย เซ็นเซอร์ GP2Y1014AU
4 ปีที่ผ่านมา
เครื่องวัดฝุ่น PM2.5 ด้วย เซ็นเซอร์ GP2Y1014AU บทความนี้ กล่าวถึงขั้นตอนการทำงานโปรเจค เครื่องวัดฝุ่น PM2.5 กับ Arduino UNO โดยใช้ เซ็นเซอร์วัดฝุ่น PM2.5 Keyestudio GP2Y1014AU ของ Sharp เซ็นเซอร์ฝุ่นนี้มีขนาดเล็กและสามารถตรวจจับฝุ่นละอองและอนุภาคควัน…
4 ปีที่ผ่านมา
เครื่องวัดฝุ่น PM2.5 ด้วย เซ็นเซอร์ GP2Y1014AU บทความนี้ กล่าวถึงขั้นตอนการทำงานโปรเจค เครื่องวัดฝุ่น PM2.5 กับ Arduino UNO โดยใช้ เซ็นเซอร์วัดฝุ่น PM2.5 Keyestudio GP2Y1014AU ของ Sharp เซ็นเซอร์ฝุ่นนี้มีขนาดเล็กและสามารถตรวจจับฝุ่นละอองและอนุภาคควัน…
มินิโปรเจค Arduino หรี่ไฟ AC 220V ผ่านบลูทูธ ด้วย App Android
5 ปีที่ผ่านมา
หรี่ไฟ AC 220V ผ่านบลูทูธ ด้วย App Android เป้าหมายและหลักการทำงานของโปรเจค ต้องการหรี่ไฟ หรือควบคุมแสงสว่างของหลอดไฟหรืออุปกรณ์ไฟฟ้าอื่นๆ แบบไร้สายผ่านโทรศัพท์มือถือด้วยแอพแอนดรอยด์ (App Android) เพื่อเป็นการประหยัดพลังงาน และความสะดวกในการควบคุม ซึ…
5 ปีที่ผ่านมา
หรี่ไฟ AC 220V ผ่านบลูทูธ ด้วย App Android เป้าหมายและหลักการทำงานของโปรเจค ต้องการหรี่ไฟ หรือควบคุมแสงสว่างของหลอดไฟหรืออุปกรณ์ไฟฟ้าอื่นๆ แบบไร้สายผ่านโทรศัพท์มือถือด้วยแอพแอนดรอยด์ (App Android) เพื่อเป็นการประหยัดพลังงาน และความสะดวกในการควบคุม ซึ…
มินิโปรเจค สร้างเกม Endless Runner ด้วย Arduino และ จอ LCD
5 ปีที่ผ่านมา
มินิโปรเจค สร้างเกม Endless Runner ด้วย Arduino และ จอ LCD การสร้างเกม ก็คือการเขียนโปรแกรมแบบหนึ่ง ให้แสดงผลถี่ๆ แล้วเขียนโปรแกรมให้การแสดงผลในแต่ละครั้ง ค่อยๆทำให้ตัวละครในภาพค่อยๆขยับ โดยการทำการเปลี่ยนภาพ หรือเคลื่อนที่ตัวละคร ก็จะเกิดการเคลื่อนไ…
5 ปีที่ผ่านมา
มินิโปรเจค สร้างเกม Endless Runner ด้วย Arduino และ จอ LCD การสร้างเกม ก็คือการเขียนโปรแกรมแบบหนึ่ง ให้แสดงผลถี่ๆ แล้วเขียนโปรแกรมให้การแสดงผลในแต่ละครั้ง ค่อยๆทำให้ตัวละครในภาพค่อยๆขยับ โดยการทำการเปลี่ยนภาพ หรือเคลื่อนที่ตัวละคร ก็จะเกิดการเคลื่อนไ…
โปรเจค IoT ESP8266 วัดอุณหภูมิ บันทึกลงดาต้าเบส MySQL
5 ปีที่ผ่านมา
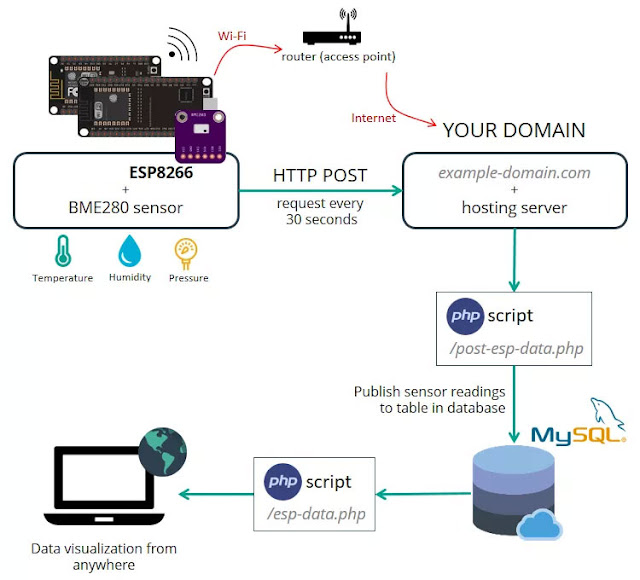
เป้าหมายของโปรเจคนี้คือเราต้องดูข้อมูลด้วยการเข้าถึงโดเมน ของเราเอง ไม่ว่าจะอยู่ส่วนไหนของโลก โดย ESP8266 จะสร้างไคลเอ็นต์ ที่ทำให้คำขอ HTTP POST ไปยังสคริปต์ PHP เพื่อแทรกข้อมูล (การอ่านเซ็นเซอร์) ลงในฐานข้อมูล MySQLโดยบทความนี้จะแสดงการส่งข้อมูลจาก…
5 ปีที่ผ่านมา
เป้าหมายของโปรเจคนี้คือเราต้องดูข้อมูลด้วยการเข้าถึงโดเมน ของเราเอง ไม่ว่าจะอยู่ส่วนไหนของโลก โดย ESP8266 จะสร้างไคลเอ็นต์ ที่ทำให้คำขอ HTTP POST ไปยังสคริปต์ PHP เพื่อแทรกข้อมูล (การอ่านเซ็นเซอร์) ลงในฐานข้อมูล MySQLโดยบทความนี้จะแสดงการส่งข้อมูลจาก…
มินิโปรเจค Arduino เปิดปิดไฟ 220V และ หรี่ไฟบ้านด้วยเสียง
5 ปีที่ผ่านมา
ควบคุมการติด-ดับ และ หรี่แสงสว่างหลอดไฟด้วยเสียงปรบมือ แนะนำ : ชุดประกอบสำเร็จ Arduino ควบคุมการติด-ดับ และ หรี่แสงสว่างหลอดไฟด้วยเสียงปรบมือ การทำ มินิโปรเจค Arduino เปิดปิดไฟ 220V และ หรี่ไฟบ้านด้วยเสียง เป้าหมายและหลักการทำงานของโปรเจค ต้องการควบค…
5 ปีที่ผ่านมา
ควบคุมการติด-ดับ และ หรี่แสงสว่างหลอดไฟด้วยเสียงปรบมือ แนะนำ : ชุดประกอบสำเร็จ Arduino ควบคุมการติด-ดับ และ หรี่แสงสว่างหลอดไฟด้วยเสียงปรบมือ การทำ มินิโปรเจค Arduino เปิดปิดไฟ 220V และ หรี่ไฟบ้านด้วยเสียง เป้าหมายและหลักการทำงานของโปรเจค ต้องการควบค…

โปรเจค ESP32-CAM กล้องดักถ่ายภาพอัตโนมัติ ด้วย PIR Motion
5 ปีที่ผ่านมา
โปรเจค ESP32-CAM กล้องดักถ่ายภาพอัตโนมัติ ด้วย PIR Motion โดยโปรเจคนี้ สามารถประยุกต์เป็นกล้องดักถ่ายภาพเมื่อมีผู้บุกรุก หรือเป็นกล้องดักถ่ายภาพสัตว์ มีชื่อเรียกหลายชื่อได้แก่ Trail Cam, Scout Cam, Camera Trap โดยผู้ใช้งานโดยซ่อนไว้ใกล้บริเวณทางที่สั…
5 ปีที่ผ่านมา
โปรเจค ESP32-CAM กล้องดักถ่ายภาพอัตโนมัติ ด้วย PIR Motion โดยโปรเจคนี้ สามารถประยุกต์เป็นกล้องดักถ่ายภาพเมื่อมีผู้บุกรุก หรือเป็นกล้องดักถ่ายภาพสัตว์ มีชื่อเรียกหลายชื่อได้แก่ Trail Cam, Scout Cam, Camera Trap โดยผู้ใช้งานโดยซ่อนไว้ใกล้บริเวณทางที่สั…
มินิโปรเจค Arduino อ่านค่าสี เล่นไฟล์เสียงจาก SD Card ออกลำโพง
5 ปีที่ผ่านมา
มินิโปรเจค Arduino อ่านค่าสี เล่นไฟล์เสียงจาก SD Card ออกลำโพง โปรเจค Arduino พูดโต้ตอบได้ โดยการเล่นไฟล์เสียงจาก SD Card บทความนี้จะสอนใช้งาน Arduino เล่นไฟล์เสียงจาก SD Card ออกลำโพง เราสามารถอัดเสียงพูดหรือบันทึกเสียงเพลงลง SD Card แล้ว สั่งงานให้…
5 ปีที่ผ่านมา
มินิโปรเจค Arduino อ่านค่าสี เล่นไฟล์เสียงจาก SD Card ออกลำโพง โปรเจค Arduino พูดโต้ตอบได้ โดยการเล่นไฟล์เสียงจาก SD Card บทความนี้จะสอนใช้งาน Arduino เล่นไฟล์เสียงจาก SD Card ออกลำโพง เราสามารถอัดเสียงพูดหรือบันทึกเสียงเพลงลง SD Card แล้ว สั่งงานให้…
 โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ



▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
จําหน่าย อุปกรณ์หุ่นยนต์ Arduino , ESP8266, ESP32 , STM32 , micro:bit , Paspberry Pi รับประกอบหุ่นยนต์ ชุดคิทหุ่นยนต์ ตัวอย่างโปรเจค IoT (Internet of Things) อินเทอร์เน็ตของสรรพสิ่ง
เบอร์โทร : 095-226-2116
อีเมล : robotsiam16@gmail.com
อีเมล : robotsiam16@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม