มินิโปรเจค Arduino วัดระยะทาง และ หรี่ไฟ LED อัตโนมัติ ด้วย SRF05
6 ปีที่ผ่านมา
มินิโปรเจค Arduino วัดระยะทาง และ หรี่ไฟ LED อัตโนมัติ ด้วย SRF05
เป้าหมายและหลักการทำงานของโปรเจค

ให้เซ็นเซอร์วัดระยะทาง SRF05 (input) อ่านค่าระยะทางที่ห่างจากวัตถุหน่วยเป็น เซนติเมตร ส่งให้ บอร์ด Arduino สั่งให้แสดงค่าที่วัดได้ ที่บรรทัดที่ 1 ของหน้าจอ LCD Display จากนั้น ตรวจสอบเอาระยะทางที่ต่ำกว่า 101 เซนติเมตร แล้วแปลงค่าจากระยะทาง เป็น ค่า PWM ค่าอยู่ระหว่าง 0- 255 โดยให้แสดงที่บรรทัดที่ 2 ของหน้าจอ LCD Display
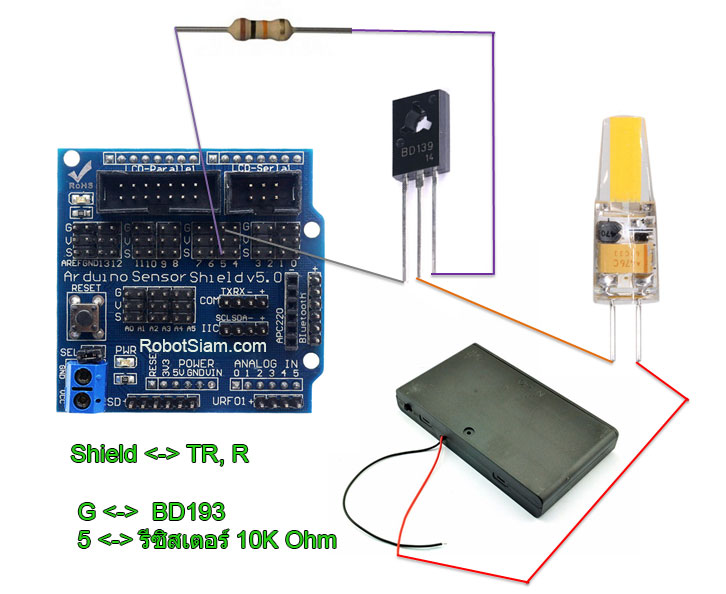
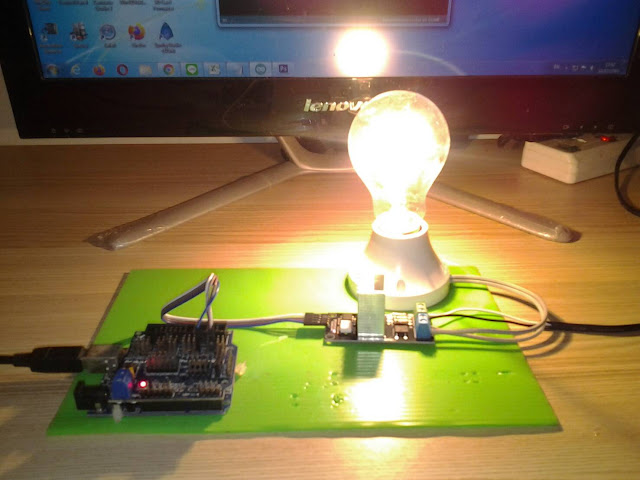
โดยเมื่อได้ค่า PWM มาแล้ว Arduino จะไปสั่งงาน (output) คือ ให้ Pin 5 ส่งค่า PWM ออกไปที่ ทรานซิสเตอร์ BD139 เพื่อให้ทรานซิสเตอร์ควบคุมการจ่ายไฟ จากรางถ่าน 12V ไปยัง LED 12V ที่มีคุณสมบัติหรี่ไฟได้ โดย LED จะสว่างตามค่า PWM ที่รับเข้ามา โดย PWM 255 จะสว่างที่สุด และ PWM 0 ก็จะสว่างน้อยที่สุด
ประโยชน์และการนำโปรเจคไปพัฒนาต่อ
วัดค่าระยะทาง ที่ห่างจากวัตถุและแสดงค่า ที่จอ LCD ได้ สำหรับเซ็นเซอร์วัดระยะทาง สามารถนำไปใช้ในการวัดขนาดสิ่งของ ตรวจจับสิ่งกีดขวางได้ โดยในด้าน Smart Farm มักนำไปใช้วัดระดับน้ำในถังน้ำ หรือนำไปใช้วัดระดับน้ำในบ่อน้ำ เพื่อให้แจ้งเตือน หรือเติมน้ำอัตโนมัติ
การควบคุม pulse width modulation (PWM) เป็นการควบคุมแบบ Digital ที่มีการนำมาใช้กันมาก โดยส่วนมากเพื่อเป็นการประหยัดพลังงาน เช่น... ช่วยในการประหยัดพลังงานไฟฟ้า โดยเมื่อวัตถุหรือสิ่งของไม่มีก็จะไม่ใช้พลังงานไฟฟ้าเลย และเมื่ออยู่ไกลจะใช้พลังงานน้อยที่สุด แต่ถ้าวัตถุหรือสิ่งของเข้ามาใกล้ จะค่อยๆใช้พลังงานไฟฟ้าเพิ่มขึ้นหรือสว่างมากขึ้น (สามารถใช้ทำงานกับคนได้ ในกรณี ที่ใส่เสื้อที่มีแผ่นสะท้อนแสงกลับมาได้)
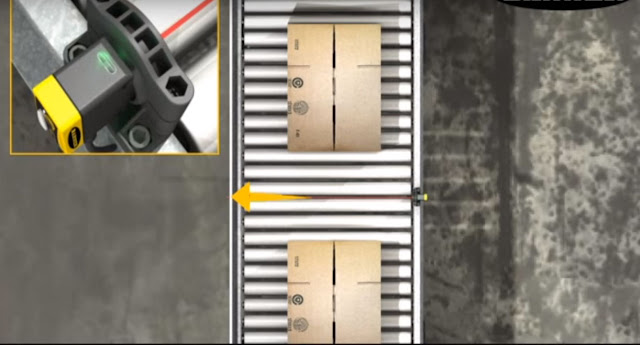
การประยุกต์การใช้งาน เช่น ในโรงงานอุตสาหกรรม เมื่อมีวัตถุหรือสิ่งของไหลผ่านในบางช่วงเวลา โดยไม่ต้องใช้พลังงานไฟฟ้าตลอดเวลา หรือสั่งให้ทำงานบางสิ่งบางอย่างเมื่อมีวัตถุ หรือสิ่งของเคลื่อนที่ผ่าน ก็ได้เช่นกัน
ตัวอย่างในชีวิตประจําวัน เช่น ประหยัดไฟ หน้ากระจกห้องน้ำ เมื่อไม่มีคนอยู่ หรือมีคนผ่านเข้าประตูบ้านก็สามารถแจ้งเตือนได้ รวมทั้งในการพรีเซนต์งานต่างๆ เช่นสิ่งของหรือรูปภาพ ก็จะสร้างความประหลาดใจ กับผู้เยี่ยมชม ที่ไฟสามารถหรี่เองได้โดยอัตโนมัติ เป็นต้น
รู้จัก เซ็นเซอร์วัดระยะทาง SRF05
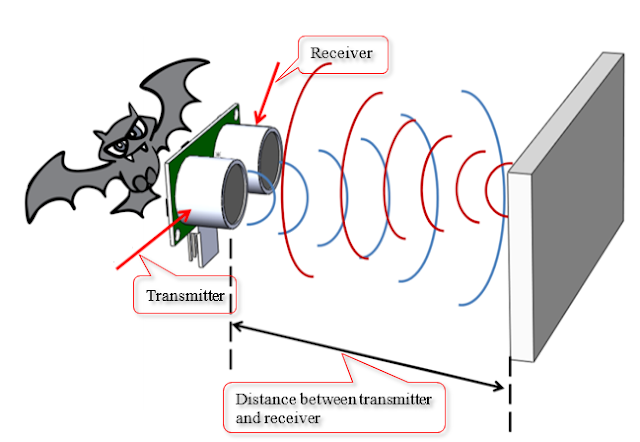
เซ็นเซอร์วัดระยะห่างรุ่น SRF05 ใช้คลื่นเสียงในย่านอัลตร้าโซนิคในการทำงาน โดยหลักการคือตัวส่งเมื่อส่งเสียงออกไปแล้วเสียงไปกระทบกับวัตถุแล้วจะทำให้คลื่นนั้นสะท้อนกลับมาแล้วตัวรับทำหน้าที่รับเข้ามา ค่าเวลาที่วัดได้หลังส่งออกไปแล้วรับกลับมาจะถูกนำไปคำนวณโดยเทียบกับความเร็วเสียงทำให้ได้ระยะทางออกมา
การทำงานเริ่มจากเมื่อทริกสัญญาณเข้าที่ขา Trig ให้เป็น HIGH จะทำให้โมดูลเริ่มวัดระยะ แล้วส่งค่าที่วัดได้ออกมาเป็นความกว้างพัลส์ที่ขา Echo นำค่าเวลาความกว้างพัลส์ที่ส่งมาจากขา Echo เมื่อนำมาหาร 29 / 2 จะได้ค่าระยะออกมาเป็นเซ็นติเมตร โดยสามารถวัดระยะได้ตั้งแต่ 2 เซ็นติเมตร ไปจนถึง 4.5 เมตร ความผิดพลาดขึ้นอยู่กับระยะทางที่วัด
รู้จัก PWM(Pulse Width Modulation)
PWM คือเทคนิดการส่งสัญญาณแบบสวิต หรือ ส่งค่าดิจิตอล 0-1 โดยให้สัญญาณความถี่คงที่ การควบคุมระยะเวลาสัญญาณสูงและสัญญาณต่ำ ที่ต่างกัน ก็จะทำให้ค่าแรงดันเฉลี่ยของสัญญาณสวิต ต่างกันด้วย

สำหรับโมดุล PWM ของ Arduino มีความละเอียด 8 bit หรือ ปรับได้ 255 ระดับ ดังนั้นค่าสัญญาณ 0 โวลต์ถึง 5 โวลต์ จะถูกแสดงเป็นสัญญาณแบบดิจิตอล จะได้ 0 ถึง 255 ซึ่งเราสามารถเทียบสัดส่วนคำนวนจากเลขจริง เป็น เลขทางดิจิตอลได้
อุปกรณ์ที่ใช้ในโปรเจค
5. HY-SRF05 SRF05 Ultrasonic Distance Sensor
6. Mini Breadboard 170 holes
7. Jumper (F2M) cable wire 20cm Female to Male
8. SMD LED Lighting G4 AC DC 12V 6W
9. BD139 NPN Power Transistor
10. รีซิสเตอร์ 10K Ohm 1/4W 5%
11. รางถ่าน AA 8 ก้อน 12 โวลต์
12. แจ๊กขั้วถ่าน 9 โวลต์ สำหรับ Ardiuno
13. สายไฟแดงดำ ขนาด 22AWG
ขั้นตอนการทำโปรเจค
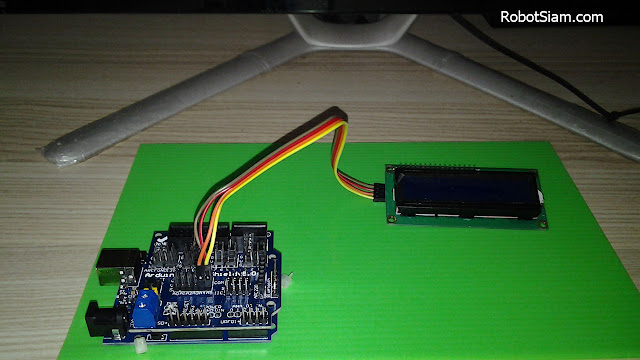
1. ต่อใช้งาน จอ LCD กับ Arduino
1.1 ยึดบอร์ด Arduino UNO

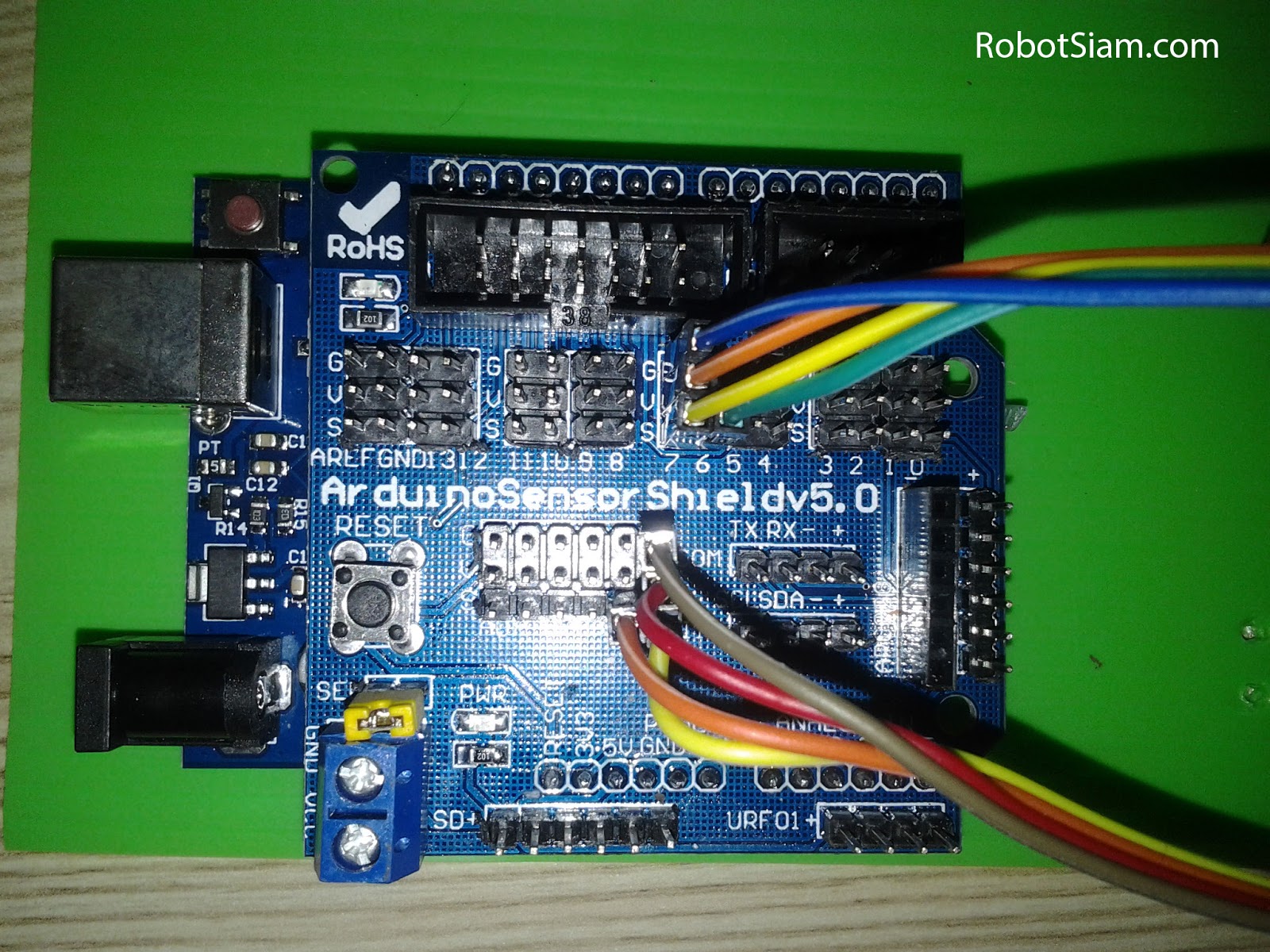
1.2 ประกอบ Sensor Shield V 5.0

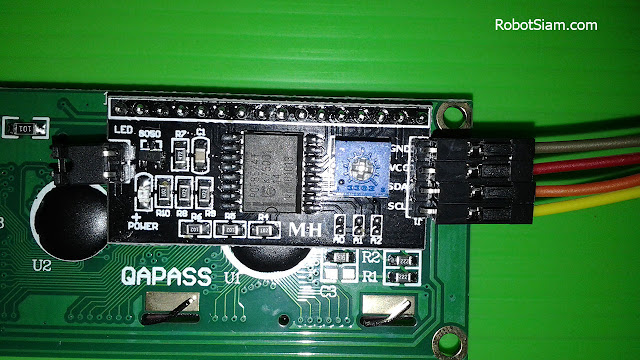
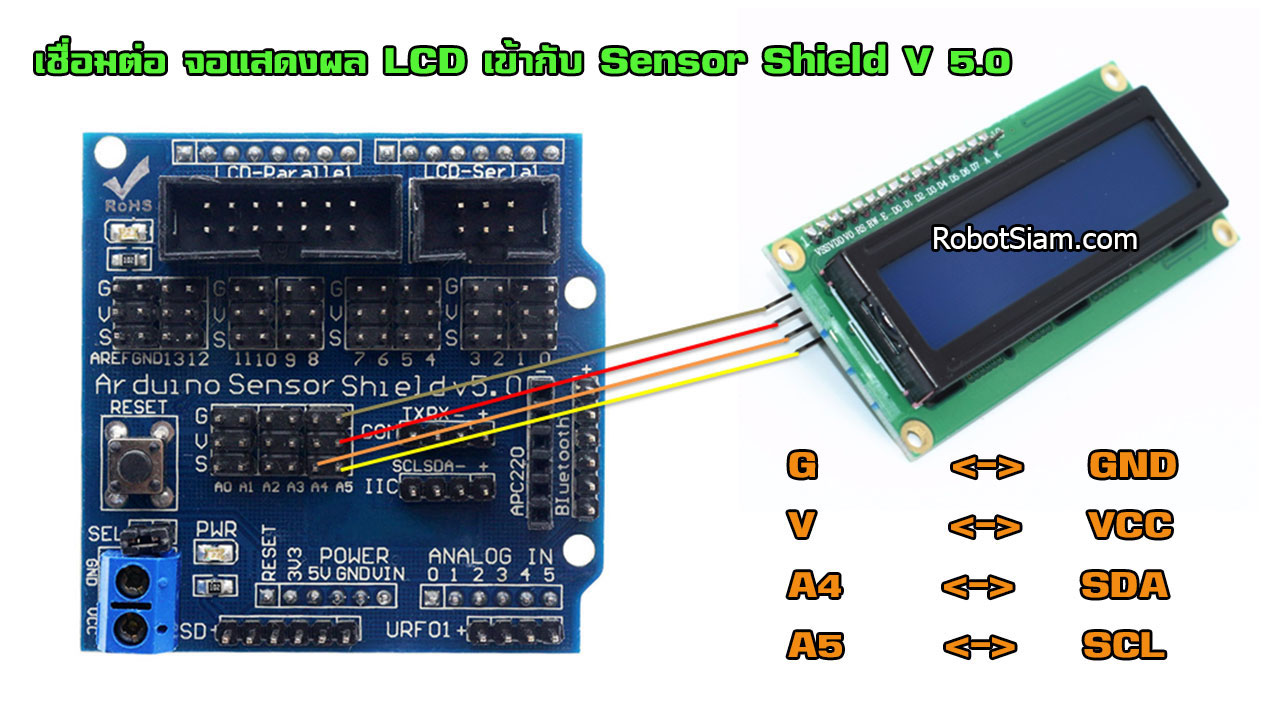
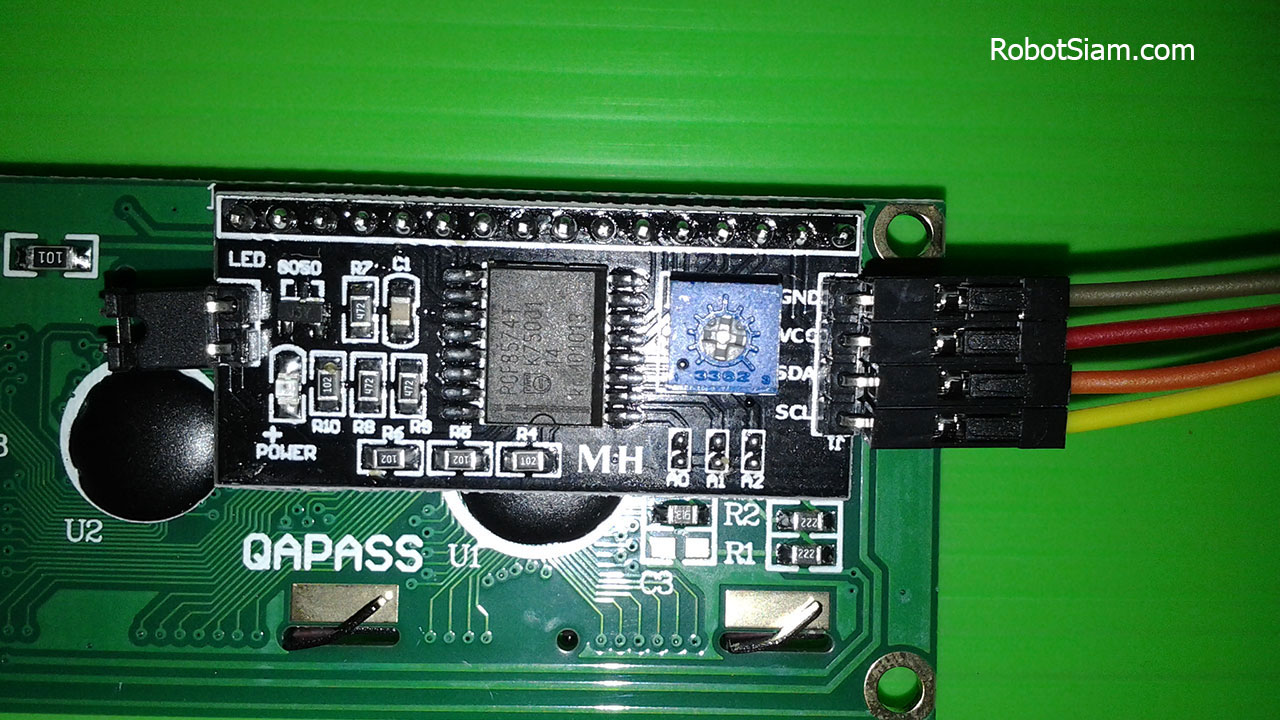
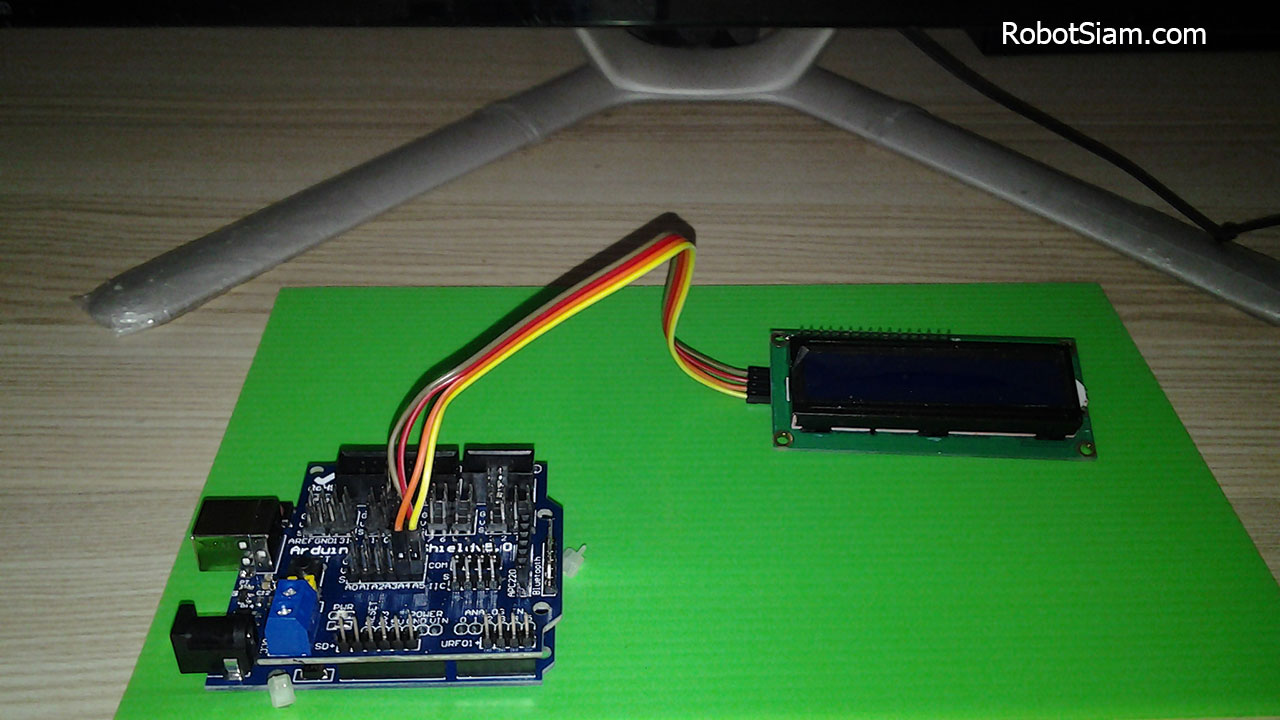
1.3 เชื่อมต่อสาย LCD

1.4 ดาวน์โหลด Arduino I2C Library สำหรับ LCD
https://github.com/fdebrabander/Arduino-LiquidCrystal-I2C-library
1.5 ติดตั้ง I2C Library สำหรับ LCD
1.5.1 เชื่อมต่อสาย USB ระหว่าง คอมพิวเตอร์ กับ บอร์ด Arduino

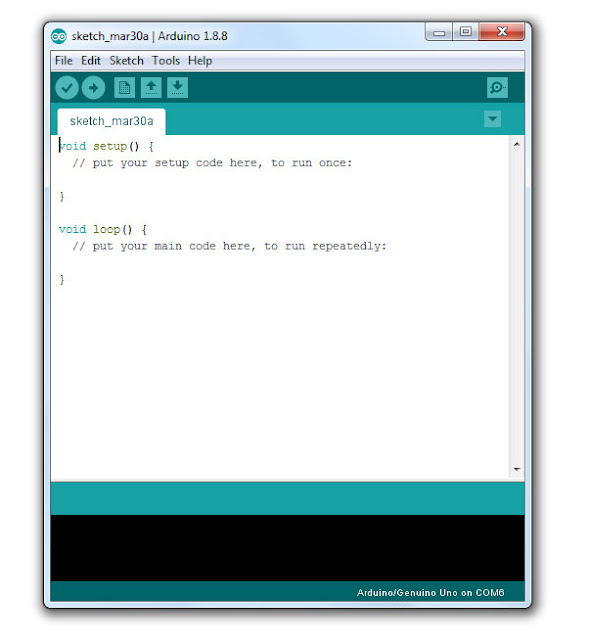
1.5.2 เปิดโปรแกรม Arduino IDE
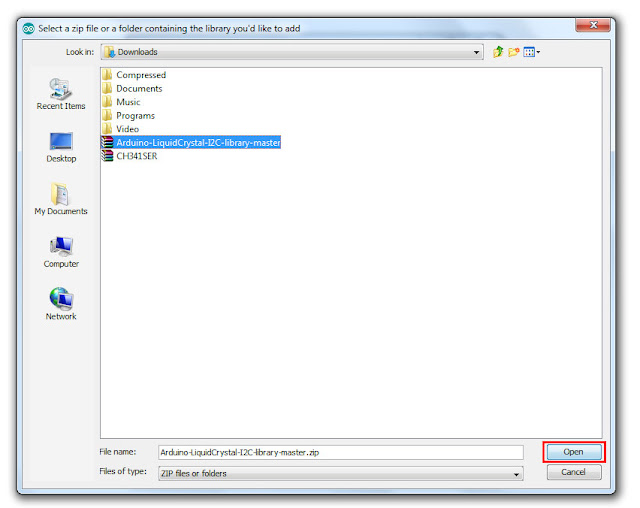
1.5.3 ไปที่ Skecth -> Include Library -> Add .ZIP Library...

1.5.4 ไปที่ ไลบรารี Arduino-LiquidCrystal-I2C-library-master.zip ที่เรา ดาวน์โหลด มา -> Open
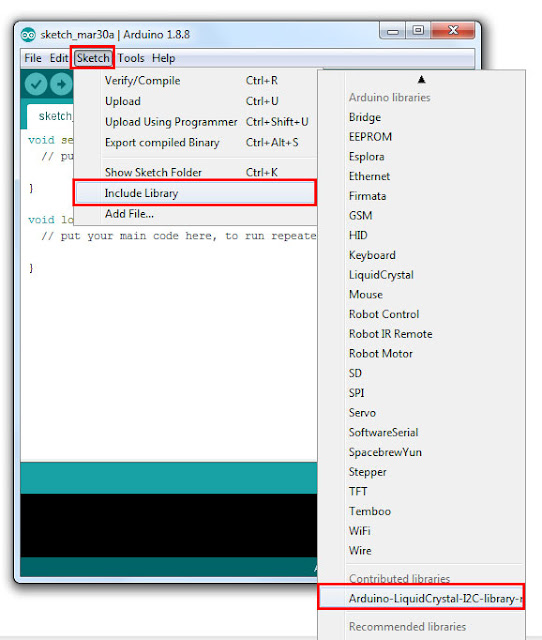
1.5.5 ตรวจสอบที่ Skecth -> Include Library จะพบ ไลบรารี Arduino-LiquidCrystal-I2C-library-master เพิ่มเข้ามาใน Arduino IDE ของเรา
 1.6 อัพโหลดโค้ด
1.6 อัพโหลดโค้ด
1.6.1 เขียนโค้ดดังนี้
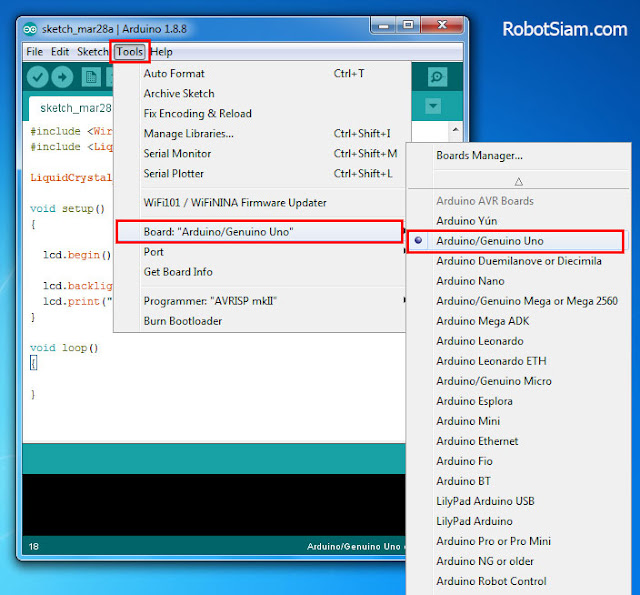
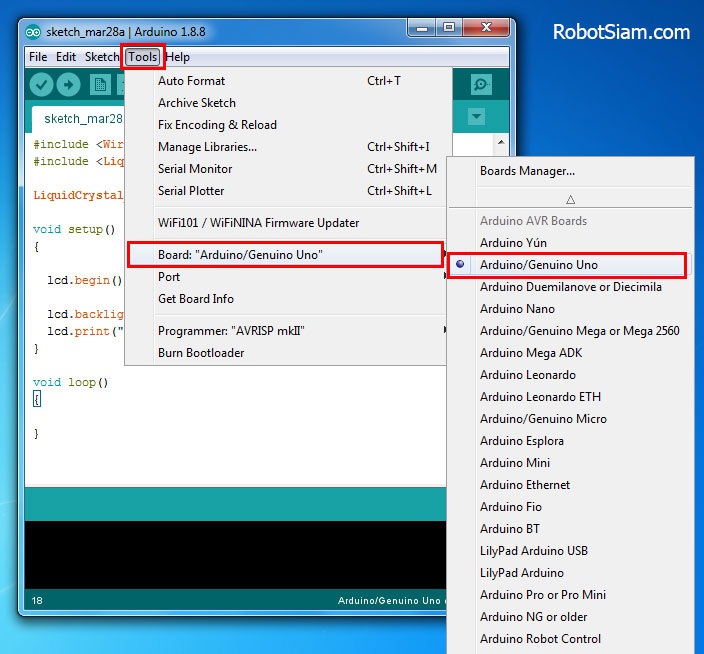
1.6.2 ไปที่ Tools > Board เลือกเป็น Arduino/Genuino UNO
1.6.3 ไปที่ Tools > Port แล้วเลือกพอร์ตที่ปรากฏ (กรณีใช้เครื่องคอมพิวเตอร์ที่มี COM Port มากกว่าหนึ่ง ให้เลือกตัวอื่นที่ไม่ใช่ COM1)
ในตัวอย่างเลือกเป็น "COM6"
(ถ้ายังว่าง หรือ เป็น COM1 ให้ตรวจสอบการติดตั้งไดร์เวอร์ การต่อสาย USB ของ Arduino UNO)
 1.6.4 กดปุ่ม
1.6.4 กดปุ่ม  เพื่ออัพโหลด
เพื่ออัพโหลด

1.6.5 หากสามารถอัพโหลดโปรแกรมลงบอร์ดได้สำเร็จ จะแสดงคำว่า Done uploading. ที่แถบด้านล่าง

1.7 ปรับความสว่างหน้าจอ LCD


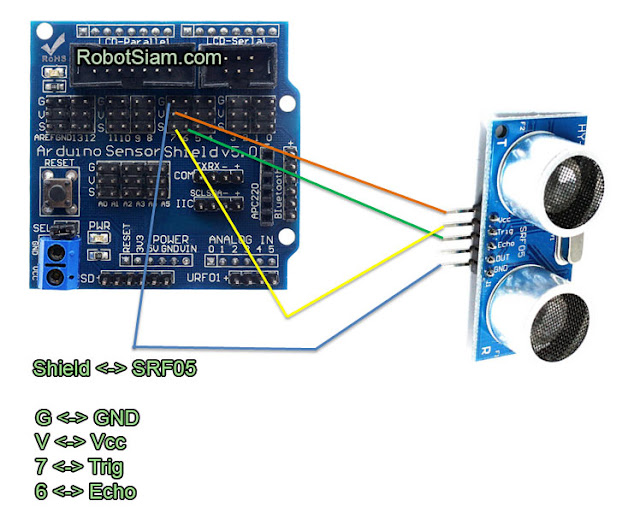
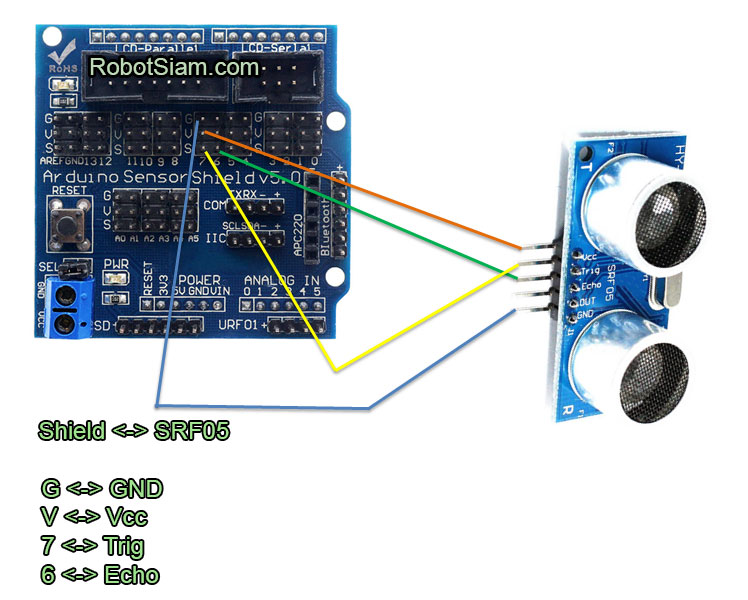
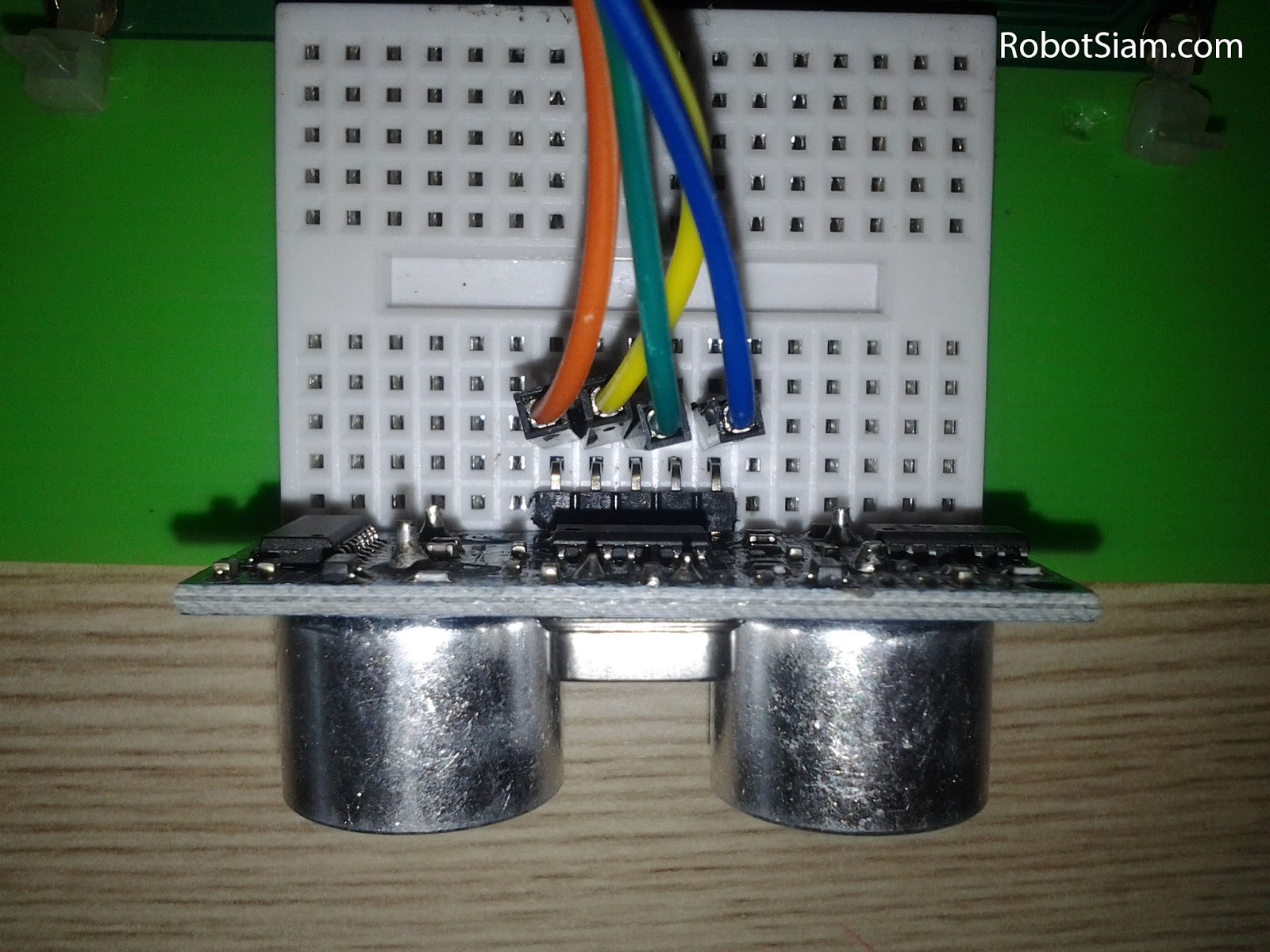
2. เชื่อมต่อ SRF05

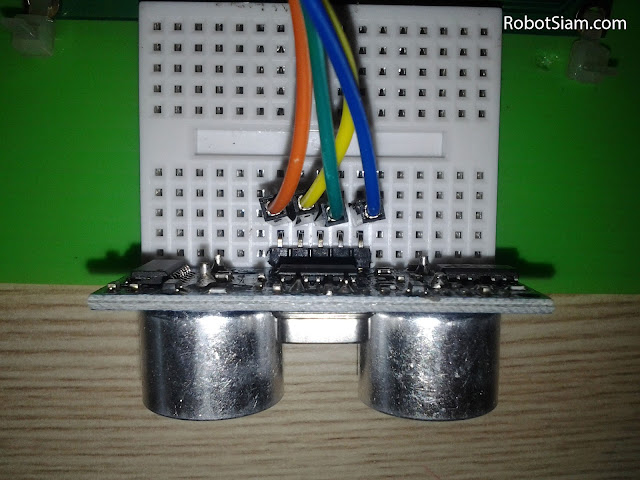
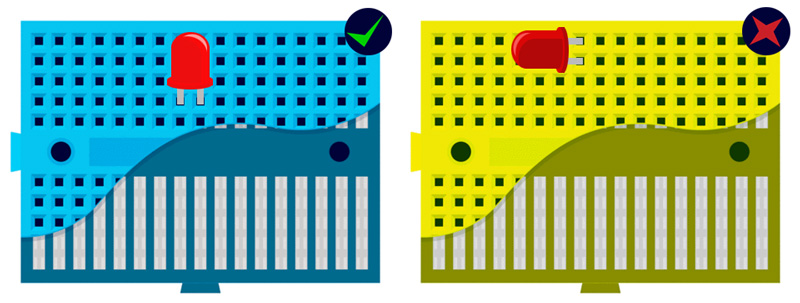
3. เชื่อมต่ออุปกรณ์ที่เหลือ ลงใน Mini Breadboard


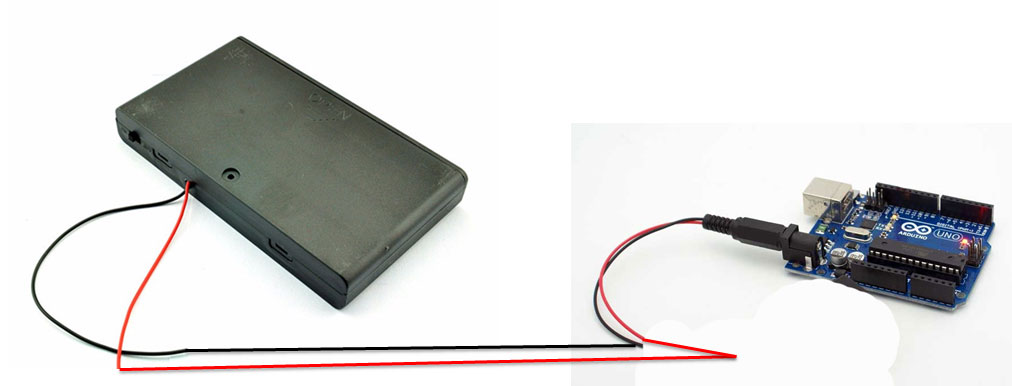
4. ตัดแจ๊กขั้วถ่านออก แล้วเชื่อมต่อ แจ๊ก เข้ากับ รางถ่าน แล้วจึงเสียบเข้า บอร์ด Arduino เพื่อเป็นไฟเลี้ยงบอร์ด

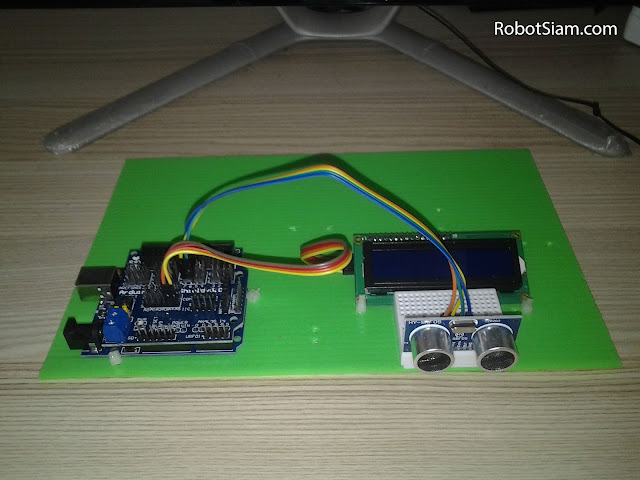
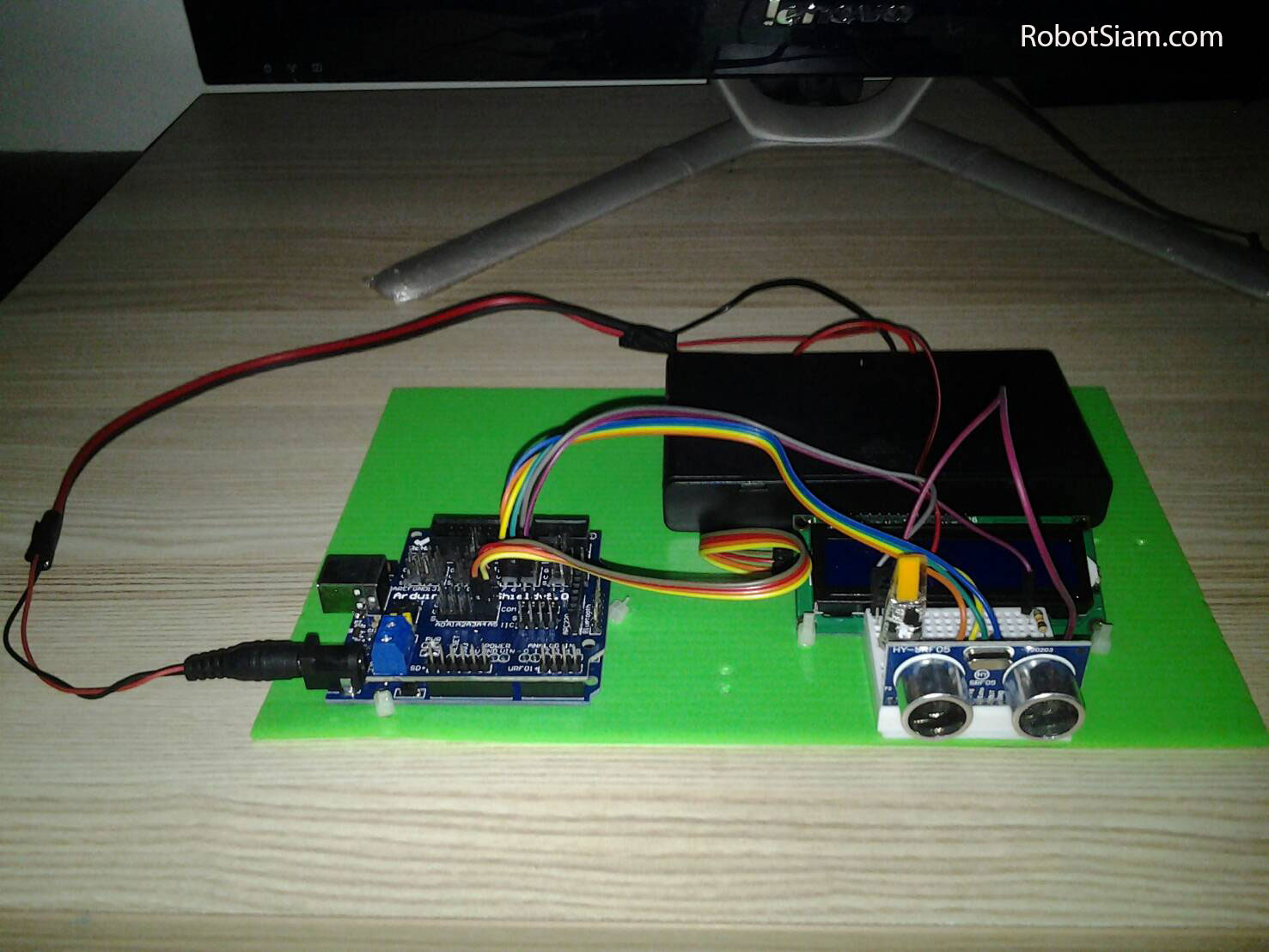
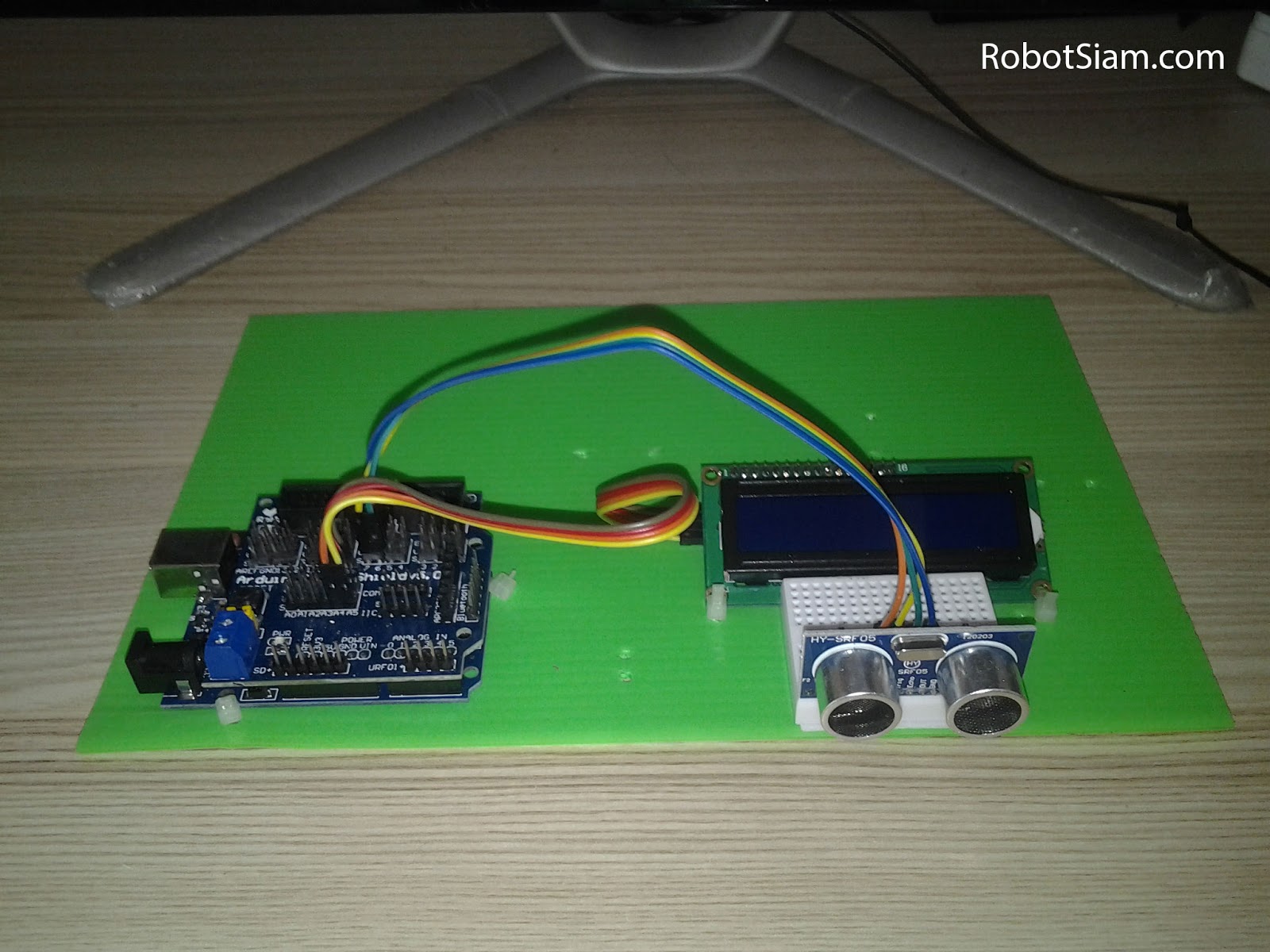
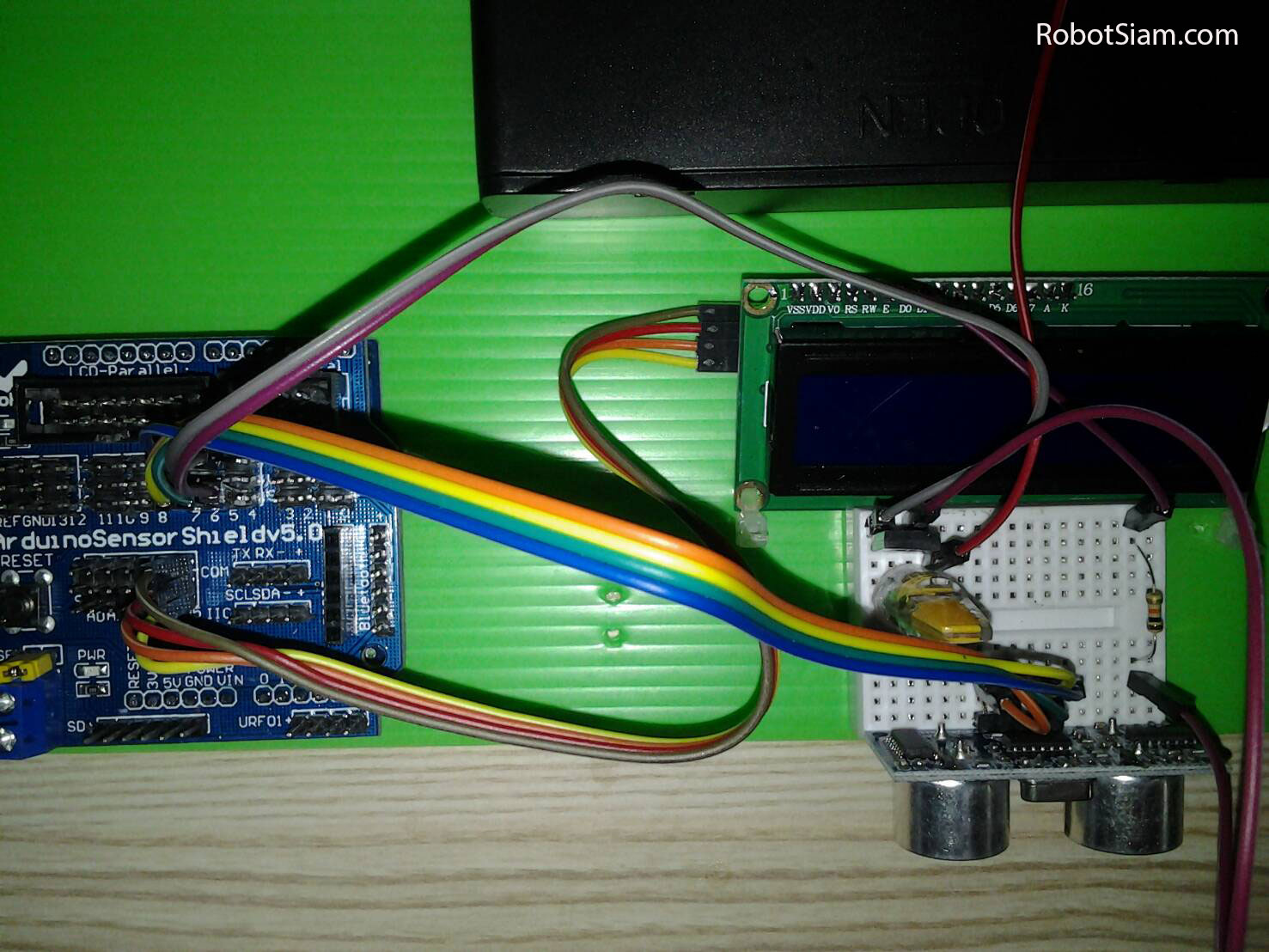
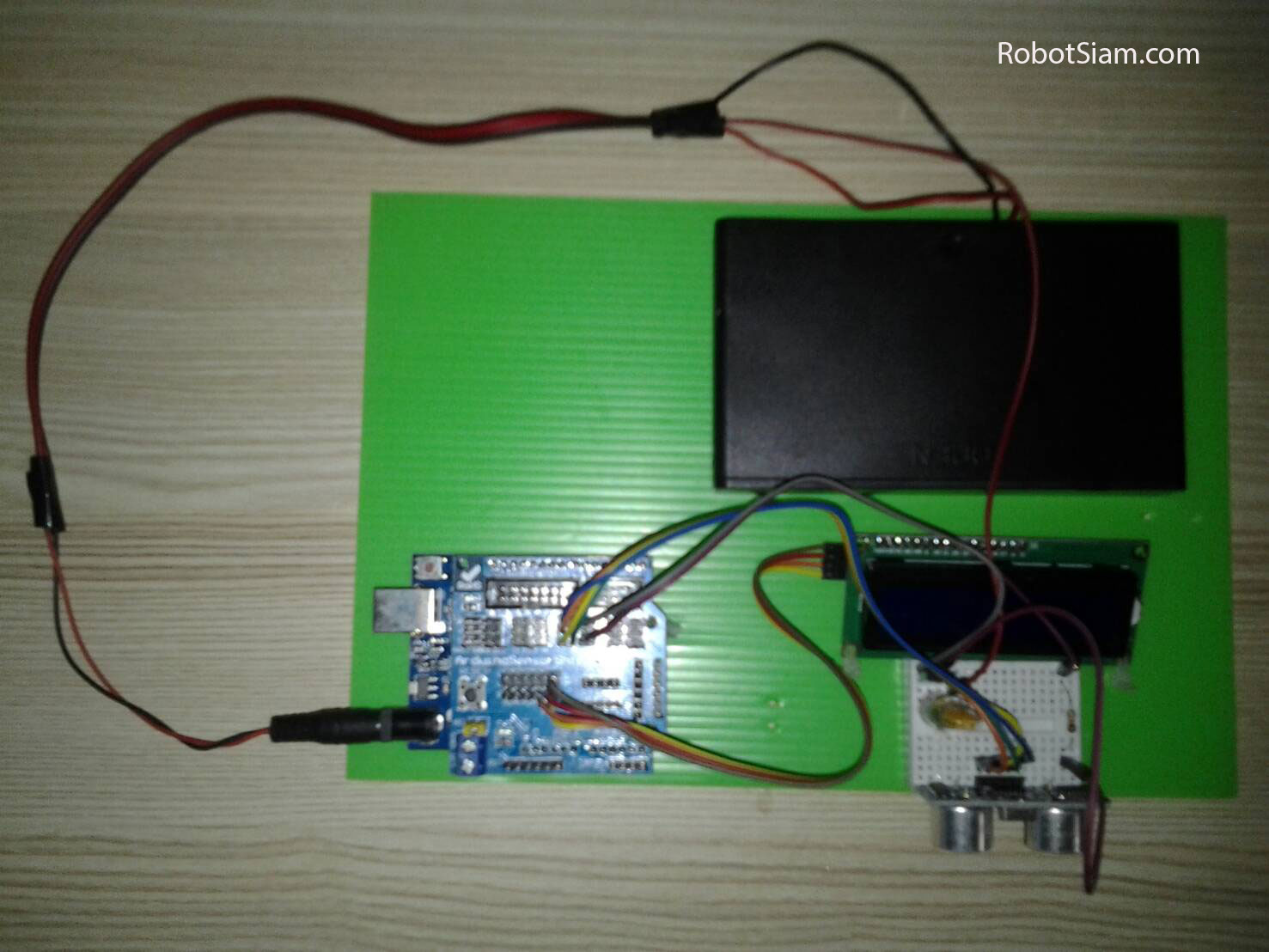
5. ภาพรวมการต่อโปรเจค


6. อัพโหลดโค้ด
7. อธิบายโค้ด
#include <Wire.h> // ให้คอมไพเลอร์นำเฮดเดอร์ไฟล์ (Library Function) ชื่อ Wire.h เข้ามาร่วมในการประมวลผลด้วย
#include <LiquidCrystal_I2C.h> // ให้คอมไพเลอร์นำเฮดเดอร์ไฟล์ (Library Function) ชื่อ LiquidCrystal_I2C.h เข้ามาร่วมในการประมวลผลด้วย
LiquidCrystal_I2C lcd(0x27, 16, 2); // ตั้งค่า Address ของ จอ LCD เป็น 0x27 และให้แสดงผล แบบ 16 ตัวอักษร 2 บรรทัด
const unsigned int TRIG_PIN = 7; // ประกาศให้พินดิจิตอล 7 เป็นตัวแปรชื่อ TRIG_PIN มีชนิดของข้อมูลคือ const คือ ค่าคงที่ , unsigned int คือ เลขจำนวนเต็ม +
const unsigned int ECHO_PIN = 6; // ประกาศให้พินดิจิตอล 6 เป็นตัวแปรชื่อ ECHO_PIN มีชนิดของข้อมูลคือ const คือ ค่าคงที่ , unsigned int คือ เลขจำนวนเต็ม +
const unsigned int LED_PIN = 5; // ประกาศให้พินดิจิตอล 5 เป็นตัวแปรชื่อ LED_PIN มีชนิดของข้อมูลคือ const คือ ค่าคงที่ , unsigned int คือ เลขจำนวนเต็ม +
void setup() { // ฟังก์ชัน setup จะทำงานครั้งแรก เพียงครั้งเดียวเท่านั้น
lcd.begin(); // เริ่มการทํางาน จอ LCD
lcd.backlight(); // ให้จอ LCD แสดงผลเป็นแบบพื้นสีดำ
pinMode(TRIG_PIN, OUTPUT); // ให้ TRIG_PIN เป็นพินโหมด แบบเอาท์พุท
pinMode(ECHO_PIN, INPUT); // ให้ ECHO_PIN เป็นพินโหมด แบบอินพุท
pinMode(LED_PIN, OUTPUT); // ให้ LED_PIN เป็นพินโหมด แบบเอาท์พุท
} // สิ้นสุดการทำงานของฟังก์ชัน setup
void loop() { // ฟังก์ชัน loop จะทำงานซ้ำ วนลูป ไปเรื่อยๆ
digitalWrite(TRIG_PIN, LOW); // ให้ขา Trig ให้เป็น LOW
delayMicroseconds(2); // หน่วงเวลา 2 ไมโครวินาที
digitalWrite(TRIG_PIN, HIGH); // ให้ขา Trig ให้เป็น HIGH
delayMicroseconds(10); // หน่วงเวลา 10 ไมโครวินาที
digitalWrite(TRIG_PIN, LOW); // ให้ขา Trig ให้เป็น LOW
const unsigned long duration = pulseIn(ECHO_PIN, HIGH); // โมดูลเริ่มวัดระยะ แล้วส่งค่าที่วัดได้ออกมาเป็นความกว้างพัลส์ที่ขา Echo และเก็บค่าไว้ในตัวแปร duration
int distance_cm = duration / 29 / 2; // วัดระยะทาง ทั้งขาไปและขากลับโดยการนำตัวแปร duration มาหารด้วย 29 จะได้หน่วยเป็นเซนติเมตร แล้วแปลงให้เหลือขาไปอย่างเดียวโดยการหารด้วย 2 อีกครั้ง และนำค่าที่ได้เก็บไว้ในตัวแปร distance_cm
int PWM; // ประกาศตัวแปร PWM มีชนิดของข้อมูลคือ เลขจำนวนเต็ม
lcd.setCursor(0, 0); // เลื่อนเคเซอร์ไปที่ตัวอักษรที่ 0 บรรทัดที่ 1
lcd.print("Distance = " + String(distance_cm) + " cm "); // แสดงผลคำว่า Distance = ระยะทางที่วัดได้ ตามด้วย หน่วย cm
if (distance_cm < 101) { // ถ้าระยะทางที่วัดได้น้อยกว่า 101 เซนติเมตร
PWM = map(distance_cm, 0, 100, 0, 255); // แปลงค่าระยะทางที่วัดได้ จาก 0 - 100 ให้เป็น 0 - 255 แล้วเก็บค่าไว้ในตัวแปร PWM
lcd.setCursor(5, 1); // เลื่อนเคเซอร์ไปที่ตัวอักษรที่ 5 บรรทัดที่ 2
lcd.print("PWM = " + String(255 - PWM) + " "); // แสดงผลคำว่า PWM = 255 ลบด้วย ค่าตัวแปร PWM
analogWrite(LED_PIN, 255 - PWM); // ให้ LED_PIN ส่งค่าอนาล็อก 0 - 255 ออกไป
}
else { // อื่นๆเช่นระยะทางที่วัดได้ เท่ากับ 101 เซนติเมตร หรือมากกว่า 101 เซนติเมตร ขึ้นไป
lcd.setCursor(5, 1); // เลื่อนเคเซอร์ไปที่ตัวอักษรที่ 5 บรรทัดที่ 2
PWM = 255; // ให้ตัวแปร PWM มีค่าเท่ากับ 255
lcd.print("PWM = " + String(255 - PWM) + " "); // แสดงผลคำว่า PWM = 255 ลบด้วย ค่าตัวแปร PWM
analogWrite(LED_PIN, 255 - PWM); // ให้ LED_PIN ส่งค่าอนาล็อก 0 - 255 ออกไป
}
delay(200); // หน่วงเวลา 200 มิลลิวินาที
} // สิ้นสุดการทำงานของฟังก์ชัน loop แล้วเริ่มทำงานฟังก์ชัน loop ใหม่ซ้ำไปเรื่อยๆ
เป้าหมายและหลักการทำงานของโปรเจค
ให้เซ็นเซอร์วัดระยะทาง SRF05 (input) อ่านค่าระยะทางที่ห่างจากวัตถุหน่วยเป็น เซนติเมตร ส่งให้ บอร์ด Arduino สั่งให้แสดงค่าที่วัดได้ ที่บรรทัดที่ 1 ของหน้าจอ LCD Display จากนั้น ตรวจสอบเอาระยะทางที่ต่ำกว่า 101 เซนติเมตร แล้วแปลงค่าจากระยะทาง เป็น ค่า PWM ค่าอยู่ระหว่าง 0- 255 โดยให้แสดงที่บรรทัดที่ 2 ของหน้าจอ LCD Display
โดยเมื่อได้ค่า PWM มาแล้ว Arduino จะไปสั่งงาน (output) คือ ให้ Pin 5 ส่งค่า PWM ออกไปที่ ทรานซิสเตอร์ BD139 เพื่อให้ทรานซิสเตอร์ควบคุมการจ่ายไฟ จากรางถ่าน 12V ไปยัง LED 12V ที่มีคุณสมบัติหรี่ไฟได้ โดย LED จะสว่างตามค่า PWM ที่รับเข้ามา โดย PWM 255 จะสว่างที่สุด และ PWM 0 ก็จะสว่างน้อยที่สุด
ประโยชน์และการนำโปรเจคไปพัฒนาต่อ
วัดค่าระยะทาง ที่ห่างจากวัตถุและแสดงค่า ที่จอ LCD ได้ สำหรับเซ็นเซอร์วัดระยะทาง สามารถนำไปใช้ในการวัดขนาดสิ่งของ ตรวจจับสิ่งกีดขวางได้ โดยในด้าน Smart Farm มักนำไปใช้วัดระดับน้ำในถังน้ำ หรือนำไปใช้วัดระดับน้ำในบ่อน้ำ เพื่อให้แจ้งเตือน หรือเติมน้ำอัตโนมัติ
การควบคุม pulse width modulation (PWM) เป็นการควบคุมแบบ Digital ที่มีการนำมาใช้กันมาก โดยส่วนมากเพื่อเป็นการประหยัดพลังงาน เช่น... ช่วยในการประหยัดพลังงานไฟฟ้า โดยเมื่อวัตถุหรือสิ่งของไม่มีก็จะไม่ใช้พลังงานไฟฟ้าเลย และเมื่ออยู่ไกลจะใช้พลังงานน้อยที่สุด แต่ถ้าวัตถุหรือสิ่งของเข้ามาใกล้ จะค่อยๆใช้พลังงานไฟฟ้าเพิ่มขึ้นหรือสว่างมากขึ้น (สามารถใช้ทำงานกับคนได้ ในกรณี ที่ใส่เสื้อที่มีแผ่นสะท้อนแสงกลับมาได้)
การประยุกต์การใช้งาน เช่น ในโรงงานอุตสาหกรรม เมื่อมีวัตถุหรือสิ่งของไหลผ่านในบางช่วงเวลา โดยไม่ต้องใช้พลังงานไฟฟ้าตลอดเวลา หรือสั่งให้ทำงานบางสิ่งบางอย่างเมื่อมีวัตถุ หรือสิ่งของเคลื่อนที่ผ่าน ก็ได้เช่นกัน
ตัวอย่างในชีวิตประจําวัน เช่น ประหยัดไฟ หน้ากระจกห้องน้ำ เมื่อไม่มีคนอยู่ หรือมีคนผ่านเข้าประตูบ้านก็สามารถแจ้งเตือนได้ รวมทั้งในการพรีเซนต์งานต่างๆ เช่นสิ่งของหรือรูปภาพ ก็จะสร้างความประหลาดใจ กับผู้เยี่ยมชม ที่ไฟสามารถหรี่เองได้โดยอัตโนมัติ เป็นต้น
รู้จัก เซ็นเซอร์วัดระยะทาง SRF05
เซ็นเซอร์วัดระยะห่างรุ่น SRF05 ใช้คลื่นเสียงในย่านอัลตร้าโซนิคในการทำงาน โดยหลักการคือตัวส่งเมื่อส่งเสียงออกไปแล้วเสียงไปกระทบกับวัตถุแล้วจะทำให้คลื่นนั้นสะท้อนกลับมาแล้วตัวรับทำหน้าที่รับเข้ามา ค่าเวลาที่วัดได้หลังส่งออกไปแล้วรับกลับมาจะถูกนำไปคำนวณโดยเทียบกับความเร็วเสียงทำให้ได้ระยะทางออกมา
การทำงานเริ่มจากเมื่อทริกสัญญาณเข้าที่ขา Trig ให้เป็น HIGH จะทำให้โมดูลเริ่มวัดระยะ แล้วส่งค่าที่วัดได้ออกมาเป็นความกว้างพัลส์ที่ขา Echo นำค่าเวลาความกว้างพัลส์ที่ส่งมาจากขา Echo เมื่อนำมาหาร 29 / 2 จะได้ค่าระยะออกมาเป็นเซ็นติเมตร โดยสามารถวัดระยะได้ตั้งแต่ 2 เซ็นติเมตร ไปจนถึง 4.5 เมตร ความผิดพลาดขึ้นอยู่กับระยะทางที่วัด
รู้จัก PWM(Pulse Width Modulation)
PWM คือเทคนิดการส่งสัญญาณแบบสวิต หรือ ส่งค่าดิจิตอล 0-1 โดยให้สัญญาณความถี่คงที่ การควบคุมระยะเวลาสัญญาณสูงและสัญญาณต่ำ ที่ต่างกัน ก็จะทำให้ค่าแรงดันเฉลี่ยของสัญญาณสวิต ต่างกันด้วย
สำหรับโมดุล PWM ของ Arduino มีความละเอียด 8 bit หรือ ปรับได้ 255 ระดับ ดังนั้นค่าสัญญาณ 0 โวลต์ถึง 5 โวลต์ จะถูกแสดงเป็นสัญญาณแบบดิจิตอล จะได้ 0 ถึง 255 ซึ่งเราสามารถเทียบสัดส่วนคำนวนจากเลขจริง เป็น เลขทางดิจิตอลได้
อุปกรณ์ที่ใช้ในโปรเจค
5. HY-SRF05 SRF05 Ultrasonic Distance Sensor
6. Mini Breadboard 170 holes
7. Jumper (F2M) cable wire 20cm Female to Male
8. SMD LED Lighting G4 AC DC 12V 6W
9. BD139 NPN Power Transistor
10. รีซิสเตอร์ 10K Ohm 1/4W 5%
11. รางถ่าน AA 8 ก้อน 12 โวลต์
12. แจ๊กขั้วถ่าน 9 โวลต์ สำหรับ Ardiuno
13. สายไฟแดงดำ ขนาด 22AWG
ขั้นตอนการทำโปรเจค
1. ต่อใช้งาน จอ LCD กับ Arduino
1.1 ยึดบอร์ด Arduino UNO

1.2 ประกอบ Sensor Shield V 5.0

1.3 เชื่อมต่อสาย LCD
1.4 ดาวน์โหลด Arduino I2C Library สำหรับ LCD
https://github.com/fdebrabander/Arduino-LiquidCrystal-I2C-library
1.5 ติดตั้ง I2C Library สำหรับ LCD
1.5.1 เชื่อมต่อสาย USB ระหว่าง คอมพิวเตอร์ กับ บอร์ด Arduino

1.5.2 เปิดโปรแกรม Arduino IDE
1.5.3 ไปที่ Skecth -> Include Library -> Add .ZIP Library...

1.5.4 ไปที่ ไลบรารี Arduino-LiquidCrystal-I2C-library-master.zip ที่เรา ดาวน์โหลด มา -> Open

1.5.5 ตรวจสอบที่ Skecth -> Include Library จะพบ ไลบรารี Arduino-LiquidCrystal-I2C-library-master เพิ่มเข้ามาใน Arduino IDE ของเรา

1.6.1 เขียนโค้ดดังนี้
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27, 16, 2);
void setup()
{
lcd.begin();
lcd.backlight();
lcd.print("Hello, world!");
}
void loop()
{
}
1.6.2 ไปที่ Tools > Board เลือกเป็น Arduino/Genuino UNO
1.6.3 ไปที่ Tools > Port แล้วเลือกพอร์ตที่ปรากฏ (กรณีใช้เครื่องคอมพิวเตอร์ที่มี COM Port มากกว่าหนึ่ง ให้เลือกตัวอื่นที่ไม่ใช่ COM1)
ในตัวอย่างเลือกเป็น "COM6"
(ถ้ายังว่าง หรือ เป็น COM1 ให้ตรวจสอบการติดตั้งไดร์เวอร์ การต่อสาย USB ของ Arduino UNO)
 เพื่ออัพโหลด
เพื่ออัพโหลด
1.6.5 หากสามารถอัพโหลดโปรแกรมลงบอร์ดได้สำเร็จ จะแสดงคำว่า Done uploading. ที่แถบด้านล่าง

1.7 ปรับความสว่างหน้าจอ LCD


2. เชื่อมต่อ SRF05
3. เชื่อมต่ออุปกรณ์ที่เหลือ ลงใน Mini Breadboard
4. ตัดแจ๊กขั้วถ่านออก แล้วเชื่อมต่อ แจ๊ก เข้ากับ รางถ่าน แล้วจึงเสียบเข้า บอร์ด Arduino เพื่อเป็นไฟเลี้ยงบอร์ด
5. ภาพรวมการต่อโปรเจค
6. อัพโหลดโค้ด
/*
Automatic distance measurement and dimmer with SRF05
For more details visit:
https://miniarduino.blogspot.com/2019/04/srf05.html
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27, 16, 2);
const unsigned int TRIG_PIN = 7;
const unsigned int ECHO_PIN = 6;
const unsigned int LED_PIN = 5;
void setup() {
lcd.begin();
lcd.backlight();
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
pinMode(LED_PIN, OUTPUT);
}
void loop() {
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
const unsigned long duration = pulseIn(ECHO_PIN, HIGH);
int distance_cm = duration / 29 / 2;
int PWM;
lcd.setCursor(0, 0);
lcd.print("Distance = " + String(distance_cm) + " cm ");
if (distance_cm < 101) {
PWM = map(distance_cm, 0, 100, 0, 255);
lcd.setCursor(5, 1);
lcd.print("PWM = " + String(255 - PWM) + " ");
analogWrite(LED_PIN, 255 - PWM);
}
else {
lcd.setCursor(5, 1);
PWM = 255;
lcd.print("PWM = " + String(255 - PWM) + " ");
analogWrite(LED_PIN, 255 - PWM);
}
delay(200);
}
7. อธิบายโค้ด
#include <Wire.h> // ให้คอมไพเลอร์นำเฮดเดอร์ไฟล์ (Library Function) ชื่อ Wire.h เข้ามาร่วมในการประมวลผลด้วย
#include <LiquidCrystal_I2C.h> // ให้คอมไพเลอร์นำเฮดเดอร์ไฟล์ (Library Function) ชื่อ LiquidCrystal_I2C.h เข้ามาร่วมในการประมวลผลด้วย
LiquidCrystal_I2C lcd(0x27, 16, 2); // ตั้งค่า Address ของ จอ LCD เป็น 0x27 และให้แสดงผล แบบ 16 ตัวอักษร 2 บรรทัด
const unsigned int TRIG_PIN = 7; // ประกาศให้พินดิจิตอล 7 เป็นตัวแปรชื่อ TRIG_PIN มีชนิดของข้อมูลคือ const คือ ค่าคงที่ , unsigned int คือ เลขจำนวนเต็ม +
const unsigned int ECHO_PIN = 6; // ประกาศให้พินดิจิตอล 6 เป็นตัวแปรชื่อ ECHO_PIN มีชนิดของข้อมูลคือ const คือ ค่าคงที่ , unsigned int คือ เลขจำนวนเต็ม +
const unsigned int LED_PIN = 5; // ประกาศให้พินดิจิตอล 5 เป็นตัวแปรชื่อ LED_PIN มีชนิดของข้อมูลคือ const คือ ค่าคงที่ , unsigned int คือ เลขจำนวนเต็ม +
void setup() { // ฟังก์ชัน setup จะทำงานครั้งแรก เพียงครั้งเดียวเท่านั้น
lcd.begin(); // เริ่มการทํางาน จอ LCD
lcd.backlight(); // ให้จอ LCD แสดงผลเป็นแบบพื้นสีดำ
pinMode(TRIG_PIN, OUTPUT); // ให้ TRIG_PIN เป็นพินโหมด แบบเอาท์พุท
pinMode(ECHO_PIN, INPUT); // ให้ ECHO_PIN เป็นพินโหมด แบบอินพุท
pinMode(LED_PIN, OUTPUT); // ให้ LED_PIN เป็นพินโหมด แบบเอาท์พุท
} // สิ้นสุดการทำงานของฟังก์ชัน setup
void loop() { // ฟังก์ชัน loop จะทำงานซ้ำ วนลูป ไปเรื่อยๆ
digitalWrite(TRIG_PIN, LOW); // ให้ขา Trig ให้เป็น LOW
delayMicroseconds(2); // หน่วงเวลา 2 ไมโครวินาที
digitalWrite(TRIG_PIN, HIGH); // ให้ขา Trig ให้เป็น HIGH
delayMicroseconds(10); // หน่วงเวลา 10 ไมโครวินาที
digitalWrite(TRIG_PIN, LOW); // ให้ขา Trig ให้เป็น LOW
const unsigned long duration = pulseIn(ECHO_PIN, HIGH); // โมดูลเริ่มวัดระยะ แล้วส่งค่าที่วัดได้ออกมาเป็นความกว้างพัลส์ที่ขา Echo และเก็บค่าไว้ในตัวแปร duration
int distance_cm = duration / 29 / 2; // วัดระยะทาง ทั้งขาไปและขากลับโดยการนำตัวแปร duration มาหารด้วย 29 จะได้หน่วยเป็นเซนติเมตร แล้วแปลงให้เหลือขาไปอย่างเดียวโดยการหารด้วย 2 อีกครั้ง และนำค่าที่ได้เก็บไว้ในตัวแปร distance_cm
int PWM; // ประกาศตัวแปร PWM มีชนิดของข้อมูลคือ เลขจำนวนเต็ม
lcd.setCursor(0, 0); // เลื่อนเคเซอร์ไปที่ตัวอักษรที่ 0 บรรทัดที่ 1
lcd.print("Distance = " + String(distance_cm) + " cm "); // แสดงผลคำว่า Distance = ระยะทางที่วัดได้ ตามด้วย หน่วย cm
if (distance_cm < 101) { // ถ้าระยะทางที่วัดได้น้อยกว่า 101 เซนติเมตร
PWM = map(distance_cm, 0, 100, 0, 255); // แปลงค่าระยะทางที่วัดได้ จาก 0 - 100 ให้เป็น 0 - 255 แล้วเก็บค่าไว้ในตัวแปร PWM
lcd.setCursor(5, 1); // เลื่อนเคเซอร์ไปที่ตัวอักษรที่ 5 บรรทัดที่ 2
lcd.print("PWM = " + String(255 - PWM) + " "); // แสดงผลคำว่า PWM = 255 ลบด้วย ค่าตัวแปร PWM
analogWrite(LED_PIN, 255 - PWM); // ให้ LED_PIN ส่งค่าอนาล็อก 0 - 255 ออกไป
}
else { // อื่นๆเช่นระยะทางที่วัดได้ เท่ากับ 101 เซนติเมตร หรือมากกว่า 101 เซนติเมตร ขึ้นไป
lcd.setCursor(5, 1); // เลื่อนเคเซอร์ไปที่ตัวอักษรที่ 5 บรรทัดที่ 2
PWM = 255; // ให้ตัวแปร PWM มีค่าเท่ากับ 255
lcd.print("PWM = " + String(255 - PWM) + " "); // แสดงผลคำว่า PWM = 255 ลบด้วย ค่าตัวแปร PWM
analogWrite(LED_PIN, 255 - PWM); // ให้ LED_PIN ส่งค่าอนาล็อก 0 - 255 ออกไป
}
delay(200); // หน่วงเวลา 200 มิลลิวินาที
} // สิ้นสุดการทำงานของฟังก์ชัน loop แล้วเริ่มทำงานฟังก์ชัน loop ใหม่ซ้ำไปเรื่อยๆ

BLOG

โปรเจค Arduino 3 in 1 หรี่ไฟบ้าน 220V ด้วยแอปมือถือ / ด้วยขวดโค๊ก / ด้วยท่าทางมือ
1 ปีที่ผ่านมา
ชุดคิท Arduino 3 in 1 หรี่ไฟบ้าน 220V ด้วย แอปมือถือ / ขวดโค๊ก / ท่าทางมือ (Gestures) การเรียนรู้การสร้างระบบหรี่ไฟบ้าน 220V โดยใช้ Arduino มีข้อดีหลายประการ ดังนี้: พัฒนาทักษะด้านอิเล็กทรอนิกส์: การสร้างระบบนี้ช่วยให้คุณได้ฝึกทักษะการทำงานกับวงจรไฟฟ…
1 ปีที่ผ่านมา
ชุดคิท Arduino 3 in 1 หรี่ไฟบ้าน 220V ด้วย แอปมือถือ / ขวดโค๊ก / ท่าทางมือ (Gestures) การเรียนรู้การสร้างระบบหรี่ไฟบ้าน 220V โดยใช้ Arduino มีข้อดีหลายประการ ดังนี้: พัฒนาทักษะด้านอิเล็กทรอนิกส์: การสร้างระบบนี้ช่วยให้คุณได้ฝึกทักษะการทำงานกับวงจรไฟฟ…

โปรเจค ESP32 เปิด-ปิดไฟบ้าน 220V ผ่านอินเตอร์เน็ต ได้ทั่วโลก ด้วย Blynk 2.0
1 ปีที่ผ่านมา
ชุดคิท IoT ESP32 2 in 1 เปิดปิดไฟ ผ่าน อินเตอร์เน็ต ด้วย BLYNK / ESP Rainmaker Blynk คือ แพลตฟอร์ม IoT ที่ช่วยให้ผู้ใช้สามารถควบคุมและติดตามอุปกรณ์ผ่านอินเทอร์เน็ตได้ง่าย ๆ โดยไม่ต้องเขียนโค้ดซับซ้อน มีแอปพลิเคชันบนสมาร์ทโฟนที่สามารถออกแบบ UI เพื่อคว…
1 ปีที่ผ่านมา
ชุดคิท IoT ESP32 2 in 1 เปิดปิดไฟ ผ่าน อินเตอร์เน็ต ด้วย BLYNK / ESP Rainmaker Blynk คือ แพลตฟอร์ม IoT ที่ช่วยให้ผู้ใช้สามารถควบคุมและติดตามอุปกรณ์ผ่านอินเทอร์เน็ตได้ง่าย ๆ โดยไม่ต้องเขียนโค้ดซับซ้อน มีแอปพลิเคชันบนสมาร์ทโฟนที่สามารถออกแบบ UI เพื่อคว…

โปรเจค หุ่นยนต์ Arduino 4in1 - บังคับด้วยแอพ / ควบคุมด้วยเสียงปรบมือ / เดินตามเส้น / หลบสิ่งกีดขวาง
1 ปีที่ผ่านมา
ชุดคิท หุ่นยนต์ Arduino 4in1 - บังคับด้วยแอพ / ควบคุมด้วยเสียงปรบมือ / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ Arduino 4in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการ…
1 ปีที่ผ่านมา
ชุดคิท หุ่นยนต์ Arduino 4in1 - บังคับด้วยแอพ / ควบคุมด้วยเสียงปรบมือ / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ Arduino 4in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการ…

โปรเจค หุ่นยนต์ ESP8266 3in1 - บังคับผ่าน WIFI / เดินตามเส้น / หลบสิ่งกีดขวาง
1 ปีที่ผ่านมา
ชุดคิท หุ่นยนต์ ESP8266 3in1 - บังคับผ่าน WIFI / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ ESP8266 V3 3in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการเรียนรู้การสร้างหุ่…
1 ปีที่ผ่านมา
ชุดคิท หุ่นยนต์ ESP8266 3in1 - บังคับผ่าน WIFI / เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ ESP8266 V3 3in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรงเรียน สถานศึกษา ใช้ในการเรียนรู้การสร้างหุ่…
โปรเจค หุ่นยนต์ ESP32 5 in 1 - บังคับผ่าน Bluetooth / บังคับผ่าน WIFI / บังคับผ่านอินเตอร์เน็ต / เดินตามเส้น / หลบสิ่งกีดขวาง
1 ปีที่ผ่านมา
ชุดคิท หุ่นยนต์ ESP32 5 in 1 - บังคับผ่าน Bluetooth / บังคับผ่าน WIFI / บังคับ ผ่านอินเตอร์เน็ต/ เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ ESP32 4in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรง…
1 ปีที่ผ่านมา
ชุดคิท หุ่นยนต์ ESP32 5 in 1 - บังคับผ่าน Bluetooth / บังคับผ่าน WIFI / บังคับ ผ่านอินเตอร์เน็ต/ เดินตามเส้น / หลบสิ่งกีดขวาง แบบ DIY (มี ขั้นตอนวิธีทำ และ โค้ด)ชุดคิท หุ่นยนต์ ESP32 4in1 ชุดนี้ สามารถ ทดสอบ ทำโปรเจค ได้หลากหลายรูปแบบ เหมาะสำหรับ โรง…
โปรเจค ESP32 เปิด-ปิดไฟ ผ่านอินเตอร์เน็ตด้วย ESP Rainmaker
1 ปีที่ผ่านมา
ESP RainMaker เป็นแพลตฟอร์มที่ช่วยให้นักพัฒนาสร้างอุปกรณ์ที่เชื่อมต่อกับ ESP32-S2 SoC ของ Espressif โดยไม่ต้องวุ่นวายกับการจัดการโครงสร้างพื้นฐาน มี SDK ของอุปกรณ์ แอปโทรศัพท์ที่ปรับเปลี่ยนได้เอง มิดเดิลแวร์คลาวด์แบบโปร่งใส และยูทิลิตีโฮสต์เพื่อลดควา…
1 ปีที่ผ่านมา
ESP RainMaker เป็นแพลตฟอร์มที่ช่วยให้นักพัฒนาสร้างอุปกรณ์ที่เชื่อมต่อกับ ESP32-S2 SoC ของ Espressif โดยไม่ต้องวุ่นวายกับการจัดการโครงสร้างพื้นฐาน มี SDK ของอุปกรณ์ แอปโทรศัพท์ที่ปรับเปลี่ยนได้เอง มิดเดิลแวร์คลาวด์แบบโปร่งใส และยูทิลิตีโฮสต์เพื่อลดควา…

โปรเจค Arduino เปิด-ปิดไฟ ด้วย โทรศัพท์ ผ่าน แอพบลูทูธ
1 ปีที่ผ่านมา
โปรเจค Arduino: เปิด-ปิดไฟด้วย โทรศัพท์ ผ่าน แอพบลูทูธ การควบคุมการเปิด-ปิดไฟในบ้านหรือสถานที่ต่าง ๆ ได้ง่ายขึ้นด้วยการใช้ Arduino ร่วมกับบลูทูธ. ในบทความนี้, เราจะสร้างโปรเจคที่ใช้ Arduino เพื่อควบคุมไฟผ่านแอพบลูทูธบนโทรศัพท์มือถือของเรา. การทำโปรเจ…
1 ปีที่ผ่านมา
โปรเจค Arduino: เปิด-ปิดไฟด้วย โทรศัพท์ ผ่าน แอพบลูทูธ การควบคุมการเปิด-ปิดไฟในบ้านหรือสถานที่ต่าง ๆ ได้ง่ายขึ้นด้วยการใช้ Arduino ร่วมกับบลูทูธ. ในบทความนี้, เราจะสร้างโปรเจคที่ใช้ Arduino เพื่อควบคุมไฟผ่านแอพบลูทูธบนโทรศัพท์มือถือของเรา. การทำโปรเจ…
โปรเจค Arduino ไฟฟ้าจากผลไม้ กับ หลอดไฟ 220 โวลต์
1 ปีที่ผ่านมา
สอนทำโปรเจค Arduino ไฟฟ้าจากผลไม้ กับ หลอดไฟ 220 โวลต์ "ทดลองไฟฟ้าจากผลไม้" เป็นการทดลองทางวิทยาศาสตร์ที่น่าสนใจเพื่อศึกษาและทดสอบกระบวนการผลิตไฟฟ้าโดยใช้มันฝรั่งในฐานะวัตถุดิบหลัก. การทดลองนี้มุ่งเน้นการเรียนรู้และทำความเข้าใจถึงพลังงานที่เกิดขึ้นจา…
1 ปีที่ผ่านมา
สอนทำโปรเจค Arduino ไฟฟ้าจากผลไม้ กับ หลอดไฟ 220 โวลต์ "ทดลองไฟฟ้าจากผลไม้" เป็นการทดลองทางวิทยาศาสตร์ที่น่าสนใจเพื่อศึกษาและทดสอบกระบวนการผลิตไฟฟ้าโดยใช้มันฝรั่งในฐานะวัตถุดิบหลัก. การทดลองนี้มุ่งเน้นการเรียนรู้และทำความเข้าใจถึงพลังงานที่เกิดขึ้นจา…
มินิโปรเจค Arduino วัดก๊าซคาร์บอนไดออกไซด์ แสดงผลที่จอ LCD
4 ปีที่ผ่านมา
ระดับคาร์บอนไดออกไซด์ปกติ (Normal CO2 Levels) ระดับคาร์บอนไดออกไซด์ปกติผลกระทบของ CO2 ต่อผู้ใหญ่ที่มีสุขภาพที่ดีสามารถสรุปได้ดังนี้-ระดับกลางแจ้งปกติ: 350 – 450 ppm-ระดับที่ยอมรับได้: <600 ppm=”” span=””>-ข้อร้องเร…
4 ปีที่ผ่านมา
ระดับคาร์บอนไดออกไซด์ปกติ (Normal CO2 Levels) ระดับคาร์บอนไดออกไซด์ปกติผลกระทบของ CO2 ต่อผู้ใหญ่ที่มีสุขภาพที่ดีสามารถสรุปได้ดังนี้-ระดับกลางแจ้งปกติ: 350 – 450 ppm-ระดับที่ยอมรับได้: <600 ppm=”” span=””>-ข้อร้องเร…
มินิโปรเจค Arduino เครื่องวัดฝุ่น PM2.5 ด้วย เซ็นเซอร์ GP2Y1014AU
4 ปีที่ผ่านมา
เครื่องวัดฝุ่น PM2.5 ด้วย เซ็นเซอร์ GP2Y1014AU บทความนี้ กล่าวถึงขั้นตอนการทำงานโปรเจค เครื่องวัดฝุ่น PM2.5 กับ Arduino UNO โดยใช้ เซ็นเซอร์วัดฝุ่น PM2.5 Keyestudio GP2Y1014AU ของ Sharp เซ็นเซอร์ฝุ่นนี้มีขนาดเล็กและสามารถตรวจจับฝุ่นละอองและอนุภาคควัน…
4 ปีที่ผ่านมา
เครื่องวัดฝุ่น PM2.5 ด้วย เซ็นเซอร์ GP2Y1014AU บทความนี้ กล่าวถึงขั้นตอนการทำงานโปรเจค เครื่องวัดฝุ่น PM2.5 กับ Arduino UNO โดยใช้ เซ็นเซอร์วัดฝุ่น PM2.5 Keyestudio GP2Y1014AU ของ Sharp เซ็นเซอร์ฝุ่นนี้มีขนาดเล็กและสามารถตรวจจับฝุ่นละอองและอนุภาคควัน…
มินิโปรเจค Arduino หรี่ไฟ AC 220V ผ่านบลูทูธ ด้วย App Android
5 ปีที่ผ่านมา
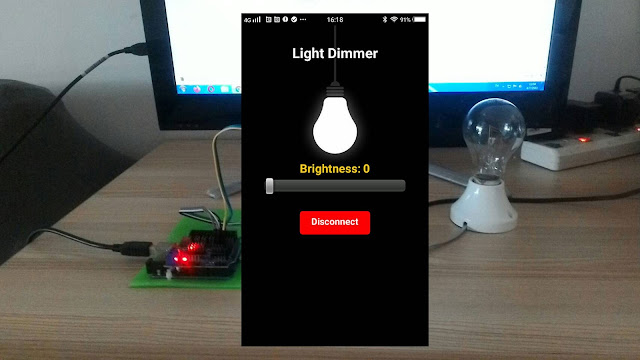
หรี่ไฟ AC 220V ผ่านบลูทูธ ด้วย App Android เป้าหมายและหลักการทำงานของโปรเจค ต้องการหรี่ไฟ หรือควบคุมแสงสว่างของหลอดไฟหรืออุปกรณ์ไฟฟ้าอื่นๆ แบบไร้สายผ่านโทรศัพท์มือถือด้วยแอพแอนดรอยด์ (App Android) เพื่อเป็นการประหยัดพลังงาน และความสะดวกในการควบคุม ซึ…
5 ปีที่ผ่านมา
หรี่ไฟ AC 220V ผ่านบลูทูธ ด้วย App Android เป้าหมายและหลักการทำงานของโปรเจค ต้องการหรี่ไฟ หรือควบคุมแสงสว่างของหลอดไฟหรืออุปกรณ์ไฟฟ้าอื่นๆ แบบไร้สายผ่านโทรศัพท์มือถือด้วยแอพแอนดรอยด์ (App Android) เพื่อเป็นการประหยัดพลังงาน และความสะดวกในการควบคุม ซึ…
มินิโปรเจค สร้างเกม Endless Runner ด้วย Arduino และ จอ LCD
5 ปีที่ผ่านมา
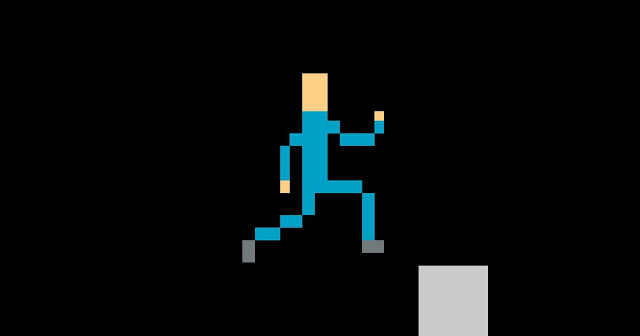
มินิโปรเจค สร้างเกม Endless Runner ด้วย Arduino และ จอ LCD การสร้างเกม ก็คือการเขียนโปรแกรมแบบหนึ่ง ให้แสดงผลถี่ๆ แล้วเขียนโปรแกรมให้การแสดงผลในแต่ละครั้ง ค่อยๆทำให้ตัวละครในภาพค่อยๆขยับ โดยการทำการเปลี่ยนภาพ หรือเคลื่อนที่ตัวละคร ก็จะเกิดการเคลื่อนไ…
5 ปีที่ผ่านมา
มินิโปรเจค สร้างเกม Endless Runner ด้วย Arduino และ จอ LCD การสร้างเกม ก็คือการเขียนโปรแกรมแบบหนึ่ง ให้แสดงผลถี่ๆ แล้วเขียนโปรแกรมให้การแสดงผลในแต่ละครั้ง ค่อยๆทำให้ตัวละครในภาพค่อยๆขยับ โดยการทำการเปลี่ยนภาพ หรือเคลื่อนที่ตัวละคร ก็จะเกิดการเคลื่อนไ…
โปรเจค IoT ESP8266 วัดอุณหภูมิ บันทึกลงดาต้าเบส MySQL
5 ปีที่ผ่านมา
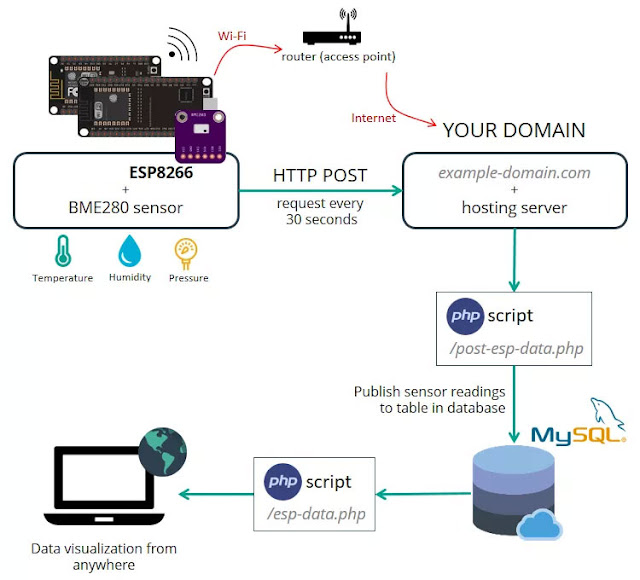
เป้าหมายของโปรเจคนี้คือเราต้องดูข้อมูลด้วยการเข้าถึงโดเมน ของเราเอง ไม่ว่าจะอยู่ส่วนไหนของโลก โดย ESP8266 จะสร้างไคลเอ็นต์ ที่ทำให้คำขอ HTTP POST ไปยังสคริปต์ PHP เพื่อแทรกข้อมูล (การอ่านเซ็นเซอร์) ลงในฐานข้อมูล MySQLโดยบทความนี้จะแสดงการส่งข้อมูลจาก…
5 ปีที่ผ่านมา
เป้าหมายของโปรเจคนี้คือเราต้องดูข้อมูลด้วยการเข้าถึงโดเมน ของเราเอง ไม่ว่าจะอยู่ส่วนไหนของโลก โดย ESP8266 จะสร้างไคลเอ็นต์ ที่ทำให้คำขอ HTTP POST ไปยังสคริปต์ PHP เพื่อแทรกข้อมูล (การอ่านเซ็นเซอร์) ลงในฐานข้อมูล MySQLโดยบทความนี้จะแสดงการส่งข้อมูลจาก…
มินิโปรเจค Arduino เปิดปิดไฟ 220V และ หรี่ไฟบ้านด้วยเสียง
5 ปีที่ผ่านมา
ควบคุมการติด-ดับ และ หรี่แสงสว่างหลอดไฟด้วยเสียงปรบมือ แนะนำ : ชุดประกอบสำเร็จ Arduino ควบคุมการติด-ดับ และ หรี่แสงสว่างหลอดไฟด้วยเสียงปรบมือ การทำ มินิโปรเจค Arduino เปิดปิดไฟ 220V และ หรี่ไฟบ้านด้วยเสียง เป้าหมายและหลักการทำงานของโปรเจค ต้องการควบค…
5 ปีที่ผ่านมา
ควบคุมการติด-ดับ และ หรี่แสงสว่างหลอดไฟด้วยเสียงปรบมือ แนะนำ : ชุดประกอบสำเร็จ Arduino ควบคุมการติด-ดับ และ หรี่แสงสว่างหลอดไฟด้วยเสียงปรบมือ การทำ มินิโปรเจค Arduino เปิดปิดไฟ 220V และ หรี่ไฟบ้านด้วยเสียง เป้าหมายและหลักการทำงานของโปรเจค ต้องการควบค…

โปรเจค ESP32-CAM กล้องดักถ่ายภาพอัตโนมัติ ด้วย PIR Motion
5 ปีที่ผ่านมา
โปรเจค ESP32-CAM กล้องดักถ่ายภาพอัตโนมัติ ด้วย PIR Motion โดยโปรเจคนี้ สามารถประยุกต์เป็นกล้องดักถ่ายภาพเมื่อมีผู้บุกรุก หรือเป็นกล้องดักถ่ายภาพสัตว์ มีชื่อเรียกหลายชื่อได้แก่ Trail Cam, Scout Cam, Camera Trap โดยผู้ใช้งานโดยซ่อนไว้ใกล้บริเวณทางที่สั…
5 ปีที่ผ่านมา
โปรเจค ESP32-CAM กล้องดักถ่ายภาพอัตโนมัติ ด้วย PIR Motion โดยโปรเจคนี้ สามารถประยุกต์เป็นกล้องดักถ่ายภาพเมื่อมีผู้บุกรุก หรือเป็นกล้องดักถ่ายภาพสัตว์ มีชื่อเรียกหลายชื่อได้แก่ Trail Cam, Scout Cam, Camera Trap โดยผู้ใช้งานโดยซ่อนไว้ใกล้บริเวณทางที่สั…
มินิโปรเจค Arduino อ่านค่าสี เล่นไฟล์เสียงจาก SD Card ออกลำโพง
5 ปีที่ผ่านมา
มินิโปรเจค Arduino อ่านค่าสี เล่นไฟล์เสียงจาก SD Card ออกลำโพง โปรเจค Arduino พูดโต้ตอบได้ โดยการเล่นไฟล์เสียงจาก SD Card บทความนี้จะสอนใช้งาน Arduino เล่นไฟล์เสียงจาก SD Card ออกลำโพง เราสามารถอัดเสียงพูดหรือบันทึกเสียงเพลงลง SD Card แล้ว สั่งงานให้…
5 ปีที่ผ่านมา
มินิโปรเจค Arduino อ่านค่าสี เล่นไฟล์เสียงจาก SD Card ออกลำโพง โปรเจค Arduino พูดโต้ตอบได้ โดยการเล่นไฟล์เสียงจาก SD Card บทความนี้จะสอนใช้งาน Arduino เล่นไฟล์เสียงจาก SD Card ออกลำโพง เราสามารถอัดเสียงพูดหรือบันทึกเสียงเพลงลง SD Card แล้ว สั่งงานให้…
 โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ



▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

โรบอทสยาม อุปกรณ์หุ่นยนต์ Arduino
จําหน่าย อุปกรณ์หุ่นยนต์ Arduino , ESP8266, ESP32 , STM32 , micro:bit , Paspberry Pi รับประกอบหุ่นยนต์ ชุดคิทหุ่นยนต์ ตัวอย่างโปรเจค IoT (Internet of Things) อินเทอร์เน็ตของสรรพสิ่ง
เบอร์โทร : 095-226-2116
อีเมล : robotsiam16@gmail.com
อีเมล : robotsiam16@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม